|
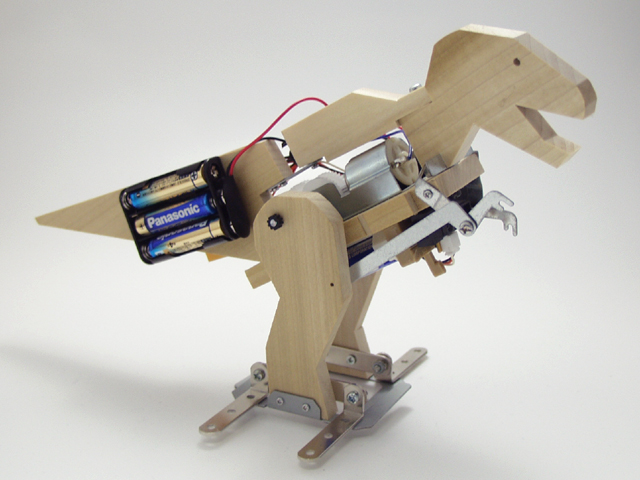
پ،‹——£‚ة”½‰‚·‚éƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXƒچƒ{ƒbƒg
‡@‹——£ƒZƒ“ƒT“‹چعپI
ƒ}ƒCƒRƒ“‚ًژg‚ي‚ب‚¢‚إƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXƒچƒ{ƒbƒg‚ًگ§Œن‚µ‚ـ‚·پB
‡A‹——£‚ة”½‰‚µ‚ؤپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھ‘OŒم‚ة‚Q‘«•àچs‚µ‚ـ‚·پB
‚ئ‚ؤ‚à’ل‰؟ٹi‚ب‚Q‘«•àچs‚جƒچƒ{ƒbƒg‚ب‚ج‚إپAڈ‰‚ك‚ؤ‚Q‘«•àچs‚جگ§Œن‚ً‚³‚¹‚½‚¢•û‚ةپAچإ“K‚إ‚·پB
‡B“®‚«‚حپA2ƒpƒ^پ[ƒ“‚إپA1‚آ‚حپA’تڈي‚ح‚Q‘«•àچs‚ج‘Oگi‚ً‚µپAگl‚ب‚ا‚جڈلٹQ•¨‚ھ‚ ‚é‚ئپAŒمگi‚µ‚ـ‚·پB
‚à‚¤1‚آ‚حپA’تڈي‚ح‚Q‘«•àچs‚جŒمگi‚ً‚µپA–ع‚ج‘O‚ةژèپi“÷پj‚ً‚©‚´‚·‚ئپA‘Oگi‚µ‚ؤ‚«‚ـ‚·پB
‡CڈلٹQ•¨‚جŒں’m‚حپAگشٹOگü‚ج‹——£ƒZƒ“ƒTپ[‚ًژg‚ء‚ؤ‚¢‚é‚ج‚إپAˆأˆإ‚إ‚à–¾‚é‚¢ڈêڈٹ‚ئپA“¯—l‚ج”½‰‚ً‚µ‚ـ‚·پB
‡DƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚حپAƒ^ƒ~ƒ„‚ج•à‚چHچىƒZƒbƒg‚ً‰ü‘¢‚·‚é‚ج‚إپAچق—؟‰ءچH‚ھ‹êژè‚ب•û‚إ‚àپAƒLƒٹ‚إŒٹ‚ً‚ ‚¯‚é‚و‚¤‚بٹب’P‚ب‰ءچH‚إپA‘g‚ف—§‚ؤ‚邱‚ئ‚ھڈo—ˆ‚ـ‚·پB
‡E“dژq‰ٌکH‚حپA‹——£ƒZƒ“ƒTپA“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^پAƒٹƒŒپ[‚ھژه‚ب•”•i‚إپA‚ئ‚ؤ‚àƒVƒ“ƒvƒ‹‚إ‚·پB
‹——£ƒZƒ“ƒT‚âƒٹƒŒپ[‚ج•×‹‚ة‚àچإ“K‚إ‚·پB
‡F“dژq‰ٌکH‚حپAپu‹——£ƒZƒ“ƒT‚إƒٹƒŒپ[‚ً“®‚©‚·‰ٌکHپiDEN-L-051)پv‚ً—ک—p‚µ‚ؤ‚¢‚ـ‚·پB
‡G“–“X‚إ”ج”„‚µ‚ؤ‚¢‚éپuƒTƒ|پ[ƒg‹à‹ïپiDEN-L-003)پv‚ًژg‚¤‚ئپA“|‚ê“ï‚‚ب‚è‚ـ‚·پB
‡H“–“X‚جژ—‚½ڈ¤•i‚ةپAپuƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXƒچƒ{ƒbƒgپiDEN-D-002پjپv‚ھ‚ ‚è‚ـ‚·‚ھپA‘S‚ˆل‚¤ڈ¤•i‚إ‚·پB
 
پڈ4,400پiگإچپj
DEN-D-004
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚جٹ®گ¬ژ‚ج
‘S’·285mmپA‘S•78mmپA‘Sچ‚165mmپB
‚¨”ƒ‚¢‹پ‚ك‚ح‚±‚؟‚ç‚إ‚·پB
|
|
 |
“dژqچHچىƒ}ƒKƒWƒ“‚ةژ·•M‚µ‚ـ‚µ‚½پI
“dژqچHچىƒ}ƒKƒWƒ“پ@2012”Nپ@“~چ†پ@پi“d”gگV•·ژذپj‚جپA
پu•¨‚ة”½‰‚µ‚ؤ‘OŒمگi‚·‚éƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXƒچƒ{ƒbƒgپvP20پ`P31‚ج‹Lژ–‚حپA–{ƒLƒbƒg‚إ‚·پB
ڈ‘گذ‚ئچ‡‚ي‚¹‚ؤپA‚²——‰؛‚³‚¢‚ثپB
ƒAƒ}ƒ]ƒ“‚©‚ç‚ج‚²چw“ü‚ح‚±‚؟‚ç‚إ‚·پB
|
|
پE |
ƒ^ƒ~ƒ„‚ج•à‚ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXچHچىƒZƒbƒg‚ة‚حپAƒ‚پ[ƒ^‚à‚آ‚¢‚ؤ‚¢‚ـ‚·پB |
پE |
“dŒ¹پ@ƒ‚پ[ƒ^•”•ھپF’P‚Rٹ£“d’r‚Q–{پ@‚RVپi•ت”„‚èپjپA“dژq‰ٌکH•”•ھپF’P‚Sٹ£“d’r‚R–{پ@‚SپD‚TVپi•ت”„‚èپjپB
|
پE |
“dژq‰ٌکHٹî”آ‚حپAƒ†ƒjƒoپ[ƒTƒ‹ٹî”آ‚إ‚·پB |
پE |
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘g—§‚حپAƒnƒ“ƒ_ƒSƒe‚ًژg‚¢‚ـ‚¹‚ٌ‚ھپA“dژq‰ٌکH‚ج‘g—§‚ةپAƒnƒ“ƒ_ƒSƒe‚ًژg‚¢‚ـ‚·پB |
پE |
ƒgƒٹƒPƒ‰ƒgƒvƒX‚ح‘OگiپAŒمگi‚ج‚ف‚إپAچ¶‰E‚ة‚ح“®‚«‚ـ‚¹‚ٌپB |
پE |
ژتگ^‚ةژت‚ء‚ؤ‚¢‚é‹à‹ï‚حپA“–“X‚إ”ج”„‚µ‚ؤ‚¢‚éƒTƒ|پ[ƒg‹à‹ïDEN-D-003پi•ت”„‚èپj‚إ‚·پB |
|
پ@
ƒVƒ“ƒvƒ‹‚ب“dژq‰ٌکH‚ب‚ج‚ةپA‚Q‘«•àچs‚جگ§Œن‚ًچs‚ب‚ء‚ؤ‚¢‚ـ‚·پB
|
پyƒچƒ{ƒbƒg‚ج“®‚«پz
“®‚«‚حژں‚ج‚Qƒpƒ^پ[ƒ“‚ ‚è‚ـ‚·پB
‡@‰½‚à‚µ‚ب‚¢‚ئ‘Oگi‚µپAژè‚ً‹ك‚أ‚¯‚é‚ئŒم‘ق‚·‚éپB
‡A‰½‚à‚µ‚ب‚¢‚ئŒم‘ق‚µپAژè‚ً‹ك‚أ‚¯‚é‚ئ‘Oگi‚·‚éپB
‚ب‚ج‚إپA‡@‚جƒpƒ^پ[ƒ“‚إڈلٹQ•¨‚ھ‚ ‚é‚ئپAڈلٹQ•¨‚ج‘O‚إچs‚ء‚½‚è‚«‚½‚è‚·‚邱‚ئ‚ة‚ب‚è‚ـ‚·پB
چ¶‰E‚ة‚و‚¯‚é‚و‚¤‚بٹي—p‚بگ^ژ—‚ح‚إ‚«‚ـ‚¹‚ٌپB |
پ@پ@ |
|
پyƒ^ƒ~ƒ„‚جƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXپz
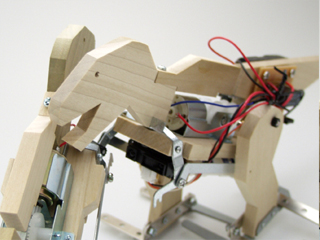
چ،‰ٌچى‚éپAپu‹——£‚ة”½‰‚·‚éƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXƒچƒ{ƒbƒgپvپiژتگ^‚Pپj‚حپAƒ^ƒ~ƒ„‚©‚ç””„‚³‚ê‚ؤ‚¢‚éپu•à‚ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXچHچىƒZƒbƒgپvپiژتگ^‚Qپj‚ًپA‰ü‘¢‚µ‚ؤچى‚è‚ـ‚·پB
ƒ^ƒ~ƒ„‚جپu•à‚ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒXچHچىƒZƒbƒgپv‚ًƒXƒgƒŒپ[ƒg‚ة‘g‚فڈم‚°‚é‚ئپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھ‘Oگi‚µ‚ـ‚·پB
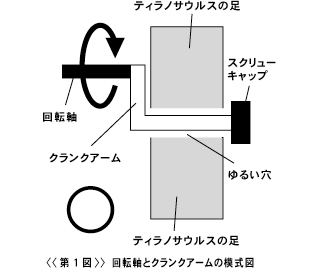
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھ‘Oگi‚·‚邵‚‚ف‚حپA‚¨• ‚ج’†‚ة‚ ‚郂پ[ƒ^‚ھ‰ٌ“]‚µپAƒMƒ„‚ً‚¢‚‚آ‚àژg‚ء‚ؤپu‰ٌ“]‘¬“xپE‰ٌ“]•ûŒüپE‘ه‚«‚³پv‚ً•د‚¦پAƒNƒ‰ƒ“ƒNƒAپ[ƒ€(ƒMƒ„ƒ{ƒbƒNƒX‚©‚çڈo‚ؤ‚¢‚é‚kŒ^‚ج•”•ھ)‚ة“`‚¦‚ـ‚·پB
|
پ@ |
 |
| پ@ |
|
|
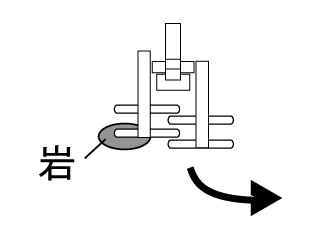
ƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚حپA‰ٌ“]‚·‚éژ²‚©‚çگL‚ر‚½ƒAپ[ƒ€‚إپA‘و‚Pگ}‚ج‚و‚¤‚ةپA‰ٌ“]ژ²‚ئƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚ح‚µ‚ء‚©‚è‚آ‚ب‚ھ‚ê‚ؤ‚¢‚ؤپA‰ٌ“]ژ²‚ھ‰ٌ“]‚·‚é‚ئپAƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚àˆêڈڈ‚ة‰ٌ“]‚µ‚ـ‚·پB
‚½‚¾‚µƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚حپA‰ٌ“]ژ²‚©‚ç—£‚ê‚ؤƒAپ[ƒ€‚ھ‚إ‚ؤ‚¢‚邽‚كپAƒAپ[ƒ€‚جگو’[‚ح‘ه‚«‚‰ٌ“]‚µ‚ـ‚·پB
‚±‚ج‘ه‚«‚‰ٌ“]‚·‚éگو’[‚ةپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ھ‚ن‚é‚‚آ‚¢‚ؤ‚¢‚邽‚كپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ھ‘ه‚«‚ڈم‰؛‰ٌ“]‚µ‚ـ‚·پB
ڈم‰؛‰ٌ“]‚·‚é‚ج‚حپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚جŒٹ‚ھ‚ن‚é‚¢‚½‚ك‚إپAƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚ج‰ٌ“]‚حپAŒٹ‚ج‚ن‚é‚ف‚إ‹zژû‚³‚ê‚ؤ‚µ‚ـ‚¢‚ـ‚·پB
|
|

|
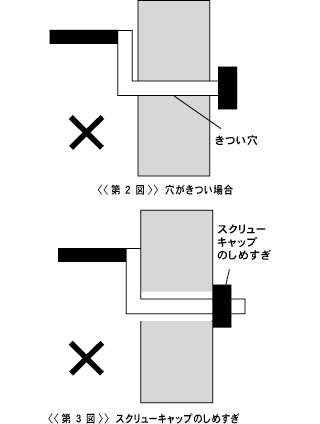
‘و‚Qگ}‚ج‚و‚¤‚ةپAŒٹ‚ھ‚«‚آ‚¢‚ئپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ھƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚ة‚µ‚ء‚©‚è‚آ‚¢‚ؤ‚¢‚邽‚كپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ھƒ‚پ[ƒ^‚ج‚و‚¤‚ةپA‚®‚é‚®‚é‰ٌ“]‚µ‚ؤ‚µ‚ـ‚¢‚ـ‚·پB
ƒNƒ‰ƒ“ƒNƒAپ[ƒ€‚ئƒXƒNƒٹƒ…پ[ƒLƒƒƒbƒv‚حپA‹‚‚µ‚ك‚ؤ—ا‚¢‚ج‚إ‚·‚ھپA‘و‚Rگ}‚ج‚و‚¤‚ةپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ئƒXƒNƒٹƒ…پ[ƒLƒƒƒbƒv‚ً’÷‚ك•t‚¯‚ؤ‚µ‚ـ‚¤‚ئپA‚«‚آ‚¢Œٹ‚ئ“¯‚¶‚ة‚ب‚ء‚ؤ‚µ‚ـ‚¤‚ج‚إپA’چˆس‚ھ•K—v‚إ‚·پB
ژ©چى‚إƒچƒ{ƒbƒg‚ًچى‚éڈêچ‡‚ب‚اپAƒXƒNƒٹƒ…پ[ƒLƒƒƒbƒv‚ج‘م‚ي‚è‚ةپAژs”ج‚جƒiƒbƒg‚ً—ک—p‚·‚é‚ئپA‰ٌ“]‚·‚邽‚ر‚ةپA‰ٌ“]‚ج‰e‹؟‚ة‚و‚èپA‚¶‚ه‚¶‚ه‚ةƒiƒbƒg‚ھ‚µ‚ك‚آ‚¯‚ç‚êپA‘و‚Rگ}‚ج‚و‚¤‚بŒ‹‰ت‚ئ“¯‚¶‚ة‚ب‚ء‚½‚èپA‹t‚ة‚ن‚é‚ٌ‚¾‚è‚·‚é‚ج‚إپA‰ٌ“]ژ²‚ةپAƒiƒbƒg‚ًژg—p‚·‚éڈêچ‡‚حپA’چˆس‚ھ•K—v‚إ‚· پB
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‘«‚ھ‰ٌ“]‚·‚é‚ئپA‘«‚ةژو‚è•t‚¯‚ç‚ê‚ؤ‚¢‚éƒٹƒ“ƒNƒچƒbƒh‚ھپAژè‚ً“®‚©‚µپA‚³‚ç‚ة“ھ‚ضپAچإŒم‚حگK”ِ‚ض“`’B‚³‚êپA‚»‚ꂼ‚ê‚ً“®‚©‚µ‘Oگi‚µ‚ـ‚·پB
‚»‚ꂼ‚ê‚ج‰آ“®‚·‚é•”•ھ‚حپAƒlƒW‚ً‚«‚آ‚‚µ‚ك‚·‚¬‚é‚ئڈمژè‚“®‚©‚ب‚¢‚ج‚إپA’چˆس‚µ‚ؤ‰؛‚³‚¢پB
پy‘«‚جƒTƒ|پ[ƒg‚ة‚آ‚¢‚ؤپz
|
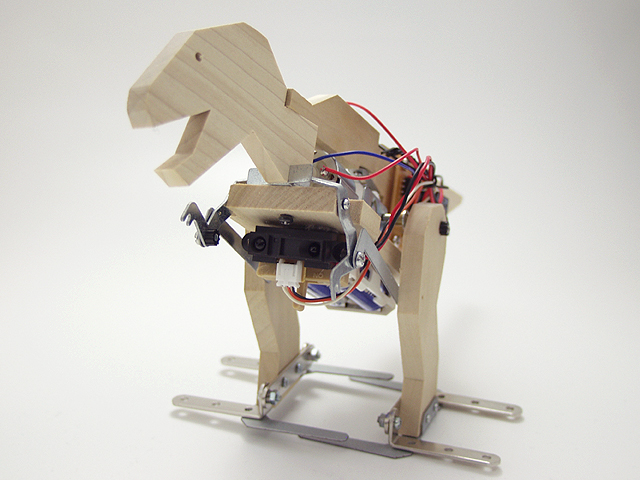
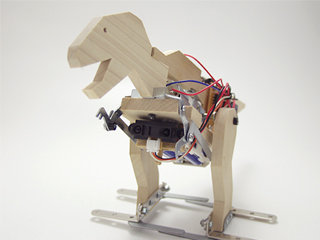
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚حپA‘O‚©‚ھ‚ف‚ة‚ب‚ء‚ؤ‚¢‚邽‚كپA‘Oگi‚³‚¹‚½چغپA‘O‚ة“|‚êˆص‚‚ب‚ء‚ؤ‚¢‚ـ‚·پB
چ¶‰E‚جƒoƒ‰ƒ“ƒX‚âپA•à‚ڈ°‚ً‘I‚خ‚ب‚¢‚ئپAگ”•à‚إ“|‚ê‚ؤ‚µ‚ـ‚¤‚ج‚إپAچ،‰ٌ‚حƒTƒ|پ[ƒg‚ً‚آ‚¯‚ؤپA“|‚ê“ï‚‚µ‚ـ‚µ‚½پB
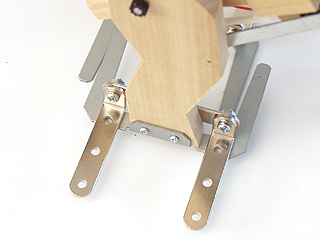
ƒTƒ|پ[ƒg‚حپAٹ„‚蔢‚ًگط‚ء‚ؤپAƒZƒچƒeپ[ƒv‚إ‚ـ‚¢‚½ƒTƒ|پ[ƒg‚ئپA‹à‹ï‚ًژg‚ء‚ؤ‚µ‚ء‚©‚肵‚½ƒTƒ|پ[‚ًچى‚è‚ـ‚µ‚½پB
‹à‹ï‚حپA“–“X‚جپuƒTƒ|پ[ƒg‹à‹ï(DEN-L-003)پv‚ًژg‚ء‚ؤ‚¢‚ـ‚·پB
‚ا‚؟‚ç‚جƒTƒ|پ[ƒg‚àپAڈ‚µ‚‚ç‚¢ƒoƒ‰ƒ“ƒX‚ھˆ«‚‚ؤ‚àپA‚ـ‚½ڈ°‚ھ‰ڑ“ت‚إ‚àپAڈمژè‚‘Oگi‚إ‚«‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پB
|
|
|
‚ي‚è‚خ‚µ‚جƒTƒ|پ[ƒg
|
|
‚©‚ء‚±‚و‚¢‹à‹ï‚جƒTƒ|پ[ƒg
|
|
پyƒچƒ{ƒbƒg‚جگ§Œن•”•ھپ@“dژq‰ٌکH‚ة‚آ‚¢‚ؤپz
ƒ}ƒCƒRƒ“‚ًژg‚ي‚ب‚¢‚إپAƒچƒ{ƒbƒg‚ًگ§Œن‚·‚é‚ج‚إپA‚ئ‚ؤ‚àƒVƒ“ƒvƒ‹‚إ‚·پB
‚»‚ê‚à‚»‚ج‚ح‚¸پA‚¨ژq—l‚جچHچى‹³ژ؛—p‚ةٹJ”‚µ‚½‹@‘ج‚ب‚ج‚إپACŒ¾Œê‚ب‚ا‚جƒ}ƒCƒRƒ“‚ح—ک—p‚إ‚«‚ـ‚¹‚ٌپB
‚»‚±‚إپAƒٹƒŒپ[پA“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^پA‹——£ƒZƒ“ƒT‚¾‚¯‚إپAچ\گ¬‚³‚ê‚ؤ‚¢‚ـ‚·پB
Œم‚حپA‘nˆسچH•v‚إƒJƒoپ[‚µ‚ـ‚µ‚½پB
‚½‚ء‚½‚±‚ꂾ‚¯‚إپAƒچƒ{ƒbƒg‚ًگ§Œن‚µ‚ـ‚·پB
ICژg‚ء‚ؤ‚¢‚ـ‚¹‚ٌپB
|
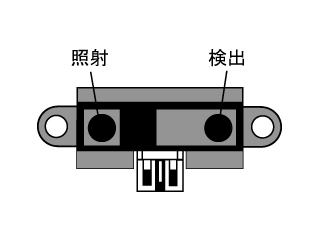
‡@‹——£ƒZƒ“ƒT
چ،‰ٌژg—p‚·‚é‹——£ƒZƒ“ƒT‚حپAگ}‚ج‚و‚¤‚بŒ`‚ً‚µ‚ؤ‚¨‚èپAگشٹOگü‚ًڈئژث‚µ‚ـ‚·پB
ڈئژث‚µ‚½گشٹOگü‚حپA•¨‘ج‚إ”½ژث‚µ–ك‚èپA‹——£ƒZƒ“ƒT‚جˆت’uŒںڈoٹي‚إپA“üژثٹp‚ة‰‚¶‚½“dˆ³‚ً”گ¶‚³‚¹‚ـ‚·پB
‚±‚ج“dˆ³‚ج’l‚ة‚و‚èپA‹——£‚ھ•ھ‚©‚è‚ـ‚·پB
چ،‰ٌ‚حپA‹——£ƒZƒ“ƒT‚ج“dˆ³‚ًƒXƒCƒbƒ`‚ئ‚µ‚ؤ—ک—p‚µ‚ؤ‚¢‚ـ‚·پB
|
پ@ |
 |
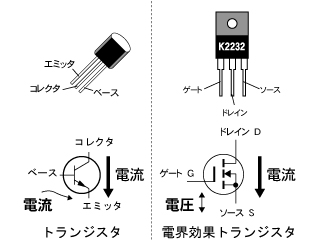
‡A“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^‚ة‚آ‚¢‚ؤ
|
“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^‚حپA‚mƒ`ƒƒƒ“ƒlƒ‹‚ج‚l‚n‚rŒ`پ@ƒGƒ“ƒnƒ“ƒXƒپƒ“ƒg‚ئŒ¾‚ي‚ê‚éژي—ق‚إپAˆê”ت“I‚بپ@‚m‚o‚mŒ^پ@ƒgƒ‰ƒ“ƒWƒXƒ^پ@‚ئپA“¯‚¶‚و‚¤‚ةژg‚¤‚±‚ئ‚ھ‚إ‚«‚ـ‚·پB
‚½‚¾‚µگ}‚ج‚و‚¤‚ةپAˆê”ت“I‚بƒgƒ‰ƒ“ƒWƒXƒ^‚ح“d—¬‚ج•د‰»‚إ‚·‚ھپA“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^‚ح“dˆ³‚ج•د‰»‚إپA“®چى‚·‚é‚ج‚إ’چˆس‚µ‚ؤ‰؛‚³‚¢پB
‚e‚d‚s‚حپAƒQپ[ƒg‚ةƒ}ƒCƒiƒX“dˆ³‚ً‚©‚¯‚ؤژg‚¤‚à‚ج‚à‚ ‚è‚ـ‚·‚ھپAƒGƒ“ƒnƒ“ƒXƒپƒ“ƒgƒ^ƒCƒv‚حپAƒQپ[ƒg“dˆ³‚ًƒ}ƒCƒiƒX“dˆ³‚ة‚µ‚ب‚‚ؤ‚à“®چى‚µپAˆê”ت“I‚بƒgƒ‰ƒ“ƒWƒXƒ^‚ج‚و‚¤‚ةپAƒQپ[ƒg“dˆ³‚ھچ‚‚¢‚ئƒhƒŒƒCƒ“‚©‚çƒ\پ[ƒX‚ض“d—¬‚ھ—¬‚êپA‚ـ‚½پAƒQپ[ƒg“dˆ³‚ً‰؛‚°‚é‚ئƒhƒŒƒCƒ“‚©‚çƒ\پ[ƒX‚ض‚ج“d—¬‚ھŒ¸‚èپAƒQپ[ƒg“dˆ³‚ً‚O‚u‚ة‚·‚ê‚خپAƒhƒŒƒCƒ“‚©‚çƒ\پ[ƒX‚ض“d—¬‚ھ—¬‚ê‚ب‚‚ب‚èپA“d‹CƒXƒCƒbƒ`‚ئ‚µ‚ؤ‚à—ک—p‚إ‚«‚ـ‚·پB
ƒQپ[ƒg“dˆ³‚ً‚O‚u‚و‚è‰؛‚جپAƒ}ƒCƒiƒX‚ة‚µ‚ب‚¢‚ئپAƒhƒŒƒCƒ“‚©‚çƒ\پ[ƒX‚ض“d—¬‚ً—¬‚·‚±‚ئ‚ً‚â‚ك‚³‚¹‚ç‚ê‚ب‚¢ژي—ق‚ج‚e‚d‚s‚حپA“d‹CƒXƒCƒbƒ`‚ئ‚µ‚ؤ—ک—p‚إ‚«‚ـ‚¹‚ٌ‚ھپA‚mƒ`ƒƒƒ“ƒlƒ‹‚جƒGƒ“ƒnƒ“ƒXƒپƒ“ƒg‚¾‚ئپA“d‹CƒXƒCƒbƒ`‚ئ‚µ‚ؤ—ک—p‚إ‚«پAچ،‰ٌ‚à“d‹CƒXƒCƒbƒ`‚ئ‚µ‚ؤ—ک—p‚µ‚ؤ‚¢‚ـ‚·پB
|
|
|
چ،‰ٌ‚جگ§Œن‚ةژg—p‚µ‚ـ‚·
|
|
ƒgƒ‰ƒ“ƒWƒXƒ^‚ئ“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^
|
|
‡BƒٹƒŒپ[‚ة‚آ‚¢‚ؤ
|
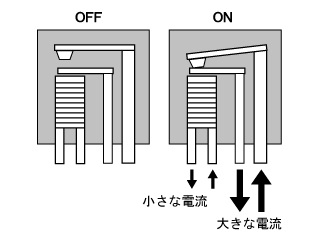
ƒٹƒŒپ[‚حپA“dژ¥گخژg‚ء‚ؤڈ¬‚³‚ب“d—¬‚إ‘ه‚«‚ب“d—¬‚ًپA‚n‚m‚ئ‚n‚e‚eڈo—ˆ‚é•”•i‚إپAگ}‚ة–حژ®گ}‚ًژ¦‚µ‚ـ‚·پB
چ،‰ٌ‚حپA“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^‚جڈ¬‚³‚ب“d—¬‚ًپAƒ‚پ[ƒ^‚ض“`‚¦‚邽‚ك‚ةژg—p‚µ‚ـ‚·پB
“dٹEŒّ‰تƒgƒ‰ƒ“ƒWƒXƒ^‚جڈ¬‚³‚ب“d—¬پi“d‹CƒXƒCƒbƒ`پj‚إپA’¼گعƒ‚پ[ƒ^‚ًON‚ئOFF‚·‚éڈêچ‡‚à‚ ‚è‚ـ‚·‚ھپAƒ‚پ[ƒ^‚ح‰ٌ“]‚·‚éچغپAƒmƒCƒY‚ھ‘½‚¢‚ج‚إپAˆê”ت“I‚ة‚حپA“dژq‰ٌکH‚ئƒ‚پ[ƒ^‚ج“dŒ¹‚ح•تپX‚ة‚µ‚ـ‚·
پB
|
|
|
ƒٹƒŒپ[‚ج–حژ®گ}
|
|
گع“_‚ج‹Lچ† |
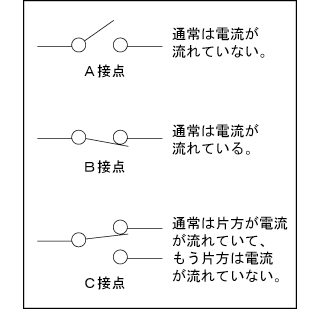
ƒٹƒŒپ[‚âƒXƒCƒbƒ`‚ة‚حپAAگع“_پABگع“_پACگع“_‚ھ‚ ‚è‚ـ‚·پB‘و‚Xگ}‚ةپA‚»‚ꂼ‚ê‚ج‹Lچ†‚ًژ¦‚µ‚ـ‚·پB
پ@
Aگع“_‚حپA’تڈي‚ح“d‹C‚ھ—¬‚ê‚ب‚¢‚إپAƒXƒCƒbƒ`پiƒٹƒŒپ[پj‚ً“ü‚ê‚é‚ئ“d‹C‚ھ—¬‚ê‚ـ‚·پBˆê”ت“I‚بƒXƒCƒbƒ`‚إ‚·پB
Bگع“_‚حپAAگع“_‚ج‹t‚إپA’تڈي‚ح“d‹C‚ھ—¬‚êپAƒXƒCƒbƒ`پiƒٹƒŒپ[پj‚ً“ü‚ê‚é‚ئپA“d‹C‚ھ—¬‚ê‚ـ‚¹‚ٌپB”ٌڈي’âژ~ƒ{ƒ^ƒ“‚ة—ک—p‚³‚ê‚ـ‚·پB
Cگع“_‚حپAAگع“_‚ئBگع“_‚ھ‘g‚فچ‡‚ي‚³‚ء‚½‚à‚ج‚إپA’تڈي‚ح‚P‚آ‚ة“d‹C‚ھ—¬‚êپA•ذ•û‚ة‚ح“d‹C‚ھ—¬‚ê‚ـ‚¹‚ٌپBƒXƒCƒbƒ`پiƒٹƒŒپ[پj‚ً“ü‚ê‚é‚ئپA“d‹C‚ھ—¬‚ê‚ؤ‚¢‚½•û‚ھ—¬‚ê‚ب‚‚ب‚èپA‚à‚¤•ذ•û‚ة“d‹C‚ھ—¬‚ê‚ـ‚·پB
چ،‰ٌ‚حپA‚±‚جƒ^ƒCƒv‚ًژg‚¢پA”zگü‚ًچH•v‚·‚é‚ئ–ت”’‚¢“®‚«‚ھژہŒ»‚إ‚«‚ـ‚·پB
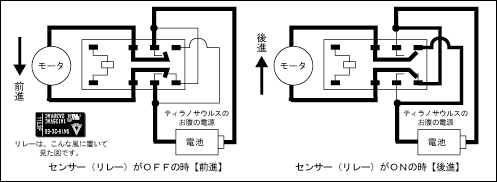
‚h‚b‚ًژg‚ي‚ب‚¢‚إƒچƒ{ƒbƒg‚ًگ§Œن‚·‚邽‚كپA‚Q‰ٌکH‚bگع“_‚جƒٹƒŒپ[‚ًپAگ}‚ج‚و‚¤‚ب”zگü‚ً‚µ‚ؤپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ً‘OگiپAŒمگi‚³‚¹‚éچH•v‚ً‚µ‚ـ‚µ‚½پB
ƒٹƒŒپ[’[ژq“à•”Œ‹گüگ}
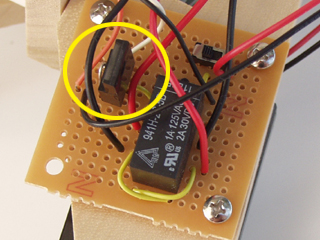
‚³‚ç‚ةپAƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‚¨• ‚ة‚آ‚¢‚ؤ‚¢‚éƒXƒCƒbƒ`‚حپAƒXƒCƒbƒ`‚ج“|‚µ•û‚إپA“d’r‚ج‹ةگ«پiƒvƒ‰ƒXƒ}ƒCƒiƒX‚جŒü‚«پj‚ً•د‚¦‚邱‚ئ‚ھڈo—ˆ‚é‚ج‚إپAژں‚جگ}‚ج‚و‚¤‚ةپAƒXƒCƒbƒ`‚P‚آ‚إپAƒZƒ“ƒT‚ج“‚«‚ھ‹t‚ة‚ب‚è‚ـ‚·پB
پ@
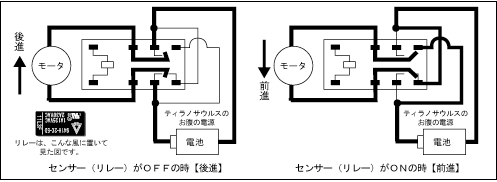
ƒٹƒŒپ[’[ژq“à•”Œ‹گüگ}پiƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ج‚¨• ‚جƒXƒCƒbƒ`‚ً‹t‚ة“|‚µ‚½ڈêچ‡پj
‚±‚ج‚و‚¤‚ةپA‚h‚b‚ًژg‚ي‚ب‚‚ؤ‚àپAƒٹƒŒپ[‚ج”zگü‚â“d’rƒ{ƒbƒNƒX‚جƒXƒCƒbƒ`‚ًگط‚è‘ض‚¦‚éژ–‚ة‚و‚èپAƒچƒ{ƒbƒg‚ًگ§Œن‚·‚邱‚ئ‚ھڈo—ˆ‚ـ‚·پB
|
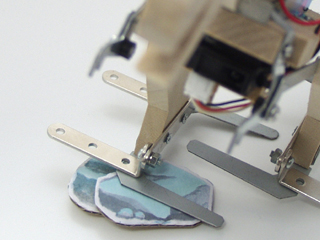
پy‚ ‚»‚ر•û‚Pپ@ٹâ‚إ—U“±ƒQپ[ƒ€پz
‘OگiپAŒمگi‚¾‚¯‚جƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚إ‚·‚ھپA‘«‚جƒTƒ|پ[ƒg‚ً‚آ‚¯‚½ژ–‚ة‚و‚èپAڈ‚µ‚ج’iچ·‚ب‚ç•à‚‚±‚ئ‚ھ‚إ‚«‚ـ‚·پB
‚±‚ج‚±‚ئ‚ً—ک—p‚µ‚ؤپAژتگ^‚ج‚و‚¤‚بٹâ‚ً‚آ‚‚èپA‘Oگi‚µ‚ؤ‚¢‚éƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھ•à‚ڈ°‚ة‚¨‚«‚ـ‚·پBڈمژè‚’u‚‚ئپA“|‚ê‚»‚¤‚ة‚ب‚è‚ب‚ھ‚ç‚àپA•ûŒü“]ٹ·‚µ‚ؤ‚‚ê‚ـ‚·پB
ٹâ‚حŒْژ†پiƒ_ƒ“ƒ{پ[ƒ‹پj‚ً’¼Œa‚R‚T‚چ‚چ‚ج‰~پi‘ب‰~‚إ‚à‚n‚jپjپAچ‚‚³5‚چ‚چ‚‚ç‚¢‚ةگط‚ء‚ؤپAچى‚ء‚ؤ‰؛‚³‚¢پB
چ‚‚³‚ھچ‚‚¢‚ئƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھ“]‚ٌ‚إ‚µ‚ـ‚¢‚ـ‚·
پB
ƒRپ[ƒX‚ًچى‚èپA’N‚ھڈمژè‚•à‚©‚¹‚邱‚ئ‚ھ‚إ‚«‚é‚©پA‹£‘ˆ‚·‚é‚ئ–ت”’‚¢‚إ‚·پB
|
پ@ |
 |
| پ@ |
|
|
|
|

|
پy‚ ‚»‚ر•û‚Qپ@‚¨“÷‚إ—U“±ƒQپ[ƒ€پz
‚à‚¤ڈ‚µƒQپ[ƒ€گ«‚ً‚à‚½‚·‚ة‚حپA‹——£ƒZƒ“ƒT‚ج‹@”\‚ًژg‚¢‚ـ‚·پB
پu’تڈي‚حŒمگi‚µپAژèپi“÷پj‚ً‚©‚´‚·‚ئ‹ك‚أ‚ƒ‚پ[ƒhپv‚ة‚µ‚ـ‚·پB
ٹ„‚蔢‚جگو‚إپA”ü–،‚µ‚»‚¤‚ب‚¨“÷‚ً–ع‚ج‘O‚ة‚؟‚ç‚آ‚©‚¹پAڈمژè‚—U“±‚·‚é‚و‚¤‚ة•à‚©‚¹‚ؤ‹£‘ˆ‚³‚¹‚ـ‚·پB
—U“±گو‚ةپA‚¨‰ظژq‚ج‚¨•َ‚ً’u‚¢‚ؤپAڈمژè‚—U“±‚إ‚«‚½‚¨ژq—l‚ة‚ ‚°‚é‚ج‚à–ت”’‚¢‚إ‚·پB
“÷‚حŒْژ†‚إچى‚é‚ئٹب’P‚إپAچى‚éچغ‚ح‹——£ƒZƒ“ƒT‚ھ”½‰‚µ‚â‚·‚¢‚و‚¤‚ةپA‘ه‚«‚چى‚ء‚ؤ‰؛‚³‚¢پB
‘Oگi‚³‚¹‚ؤ—U“±‚إ‚ب‚پAŒمگi‚³‚¹‚ؤ—U“±‚·‚éپA•…‚ء‚½‚¨“÷ƒoپ[ƒWƒ‡ƒ“‚ة‚µ‚ؤ‚à–ت”’‚¢‚إ‚·پB
•ûŒü“]ٹ·‚حپAٹâ‚ًژg‚¢‚ـ‚·پB
پ@
|

|
|

|
پy‚ ‚»‚ر•û‚Rپ@‹°—³ƒoƒgƒ‹پz
چ،—¬چs‚ج–{•¨‚جƒoƒgƒ‹ƒQپ[ƒ€‚إ‚·پB
ژتگ^‚ج‚و‚¤‚ةپA‚Q“ھ‚جƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ًŒü‚«چ‡‚ي‚¹پAگي‚ي‚¹‚ـ‚·پB
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚جƒ‚پ[ƒh‚حپu’تڈي‚ح‘Oگiƒ‚پ[ƒhپv‚ة‚µ‚ـ‚·پB
ƒ‹پ[ƒ‹‚حپAگâ‰ڈƒeپ[ƒv‚ب‚ا‚إژlٹp‚¢گü‚ً•`‚¢‚ؤƒٹƒ“ƒO‚ًچى‚è‚ـ‚·پB
ƒٹƒ“ƒO“à‚حپA•…‚ء‚½‚¨“÷‚إ‚µ‚©—U“±‚إ‚«‚ـ‚¹‚ٌپB
ƒeƒBƒ‰ƒmƒTƒEƒ‹ƒX‚ھƒٹƒ“ƒO‚ً‰z‚¦‚½‚çپAژè‚إ‚آ‚©‚ٌ‚إچD‚«‚ب•ûŒü‚ةŒü‚¯پAƒٹƒ“ƒO‚ة•ْ‚؟‚ـ‚·پB
ڈمژè‚‘ٹژè‚ج‘¤–ت‚ة‰ٌ‚肱‚فپA‘ٹژè‚ً“|‚·‚©پA“®‚¯‚ب‚‚µ‚½‚çڈں‚؟‚إ‚·پB
‚Q“ھ‚ھ‚©‚ç‚ف‚ ‚ء‚ؤ“®‚©‚ب‚¢ڈêچ‡‚حپAƒXƒ^پ[ƒgƒ‰ƒCƒ“‚©‚ç‚â‚è’¼‚µ‚إ‚·پB
|
پ@ |
2“ھ‚جŒƒ‚µ‚¢ƒoƒgƒ‹ |
| پ@ |
|
|
گ}‚ج‚و‚¤‚ةپAƒٹƒ“ƒO‚جˆê•”‚ةƒfƒbƒgƒ]پ[ƒ“پi‚±‚±‚ة“ü‚ء‚½‚畉‚¯پj‚ًگف‚¯‚½‚èپAڈ°‚ة‰ڑ“ت‚ً‚آ‚¯‚ؤ“|‚êˆص‚¢ڈêڈٹ‚ًچى‚é‚ئ‘پ‚ڈں”s‚ھ‚آ‚«‚ـ‚·پB
‚Qƒ^ƒbƒO‚ة‚µ‚ؤپA‚Pگl‚ھƒٹƒ“ƒO‚ة‚إ‚½‚çپA‚·‚©‚³‚¸‚à‚¤‚Pگl‚ھƒٹƒ“ƒO‚ة“ü‚é‚و‚¤‚ة‚µ‚ؤ‚à—ا‚¢‚إ‚·پB
‚ـ‚½“r’†‚إپA‘OگiŒمگi‚جƒ‚پ[ƒh•دٹ·پi‚¨“÷•دٹ·پj‚n‚jپAٹâ‚ح‚TŒآ‚ـ‚إ“ٹ‚°چ‚ف‚n‚jپA“ٹ‚°چ‚ٌ‚¾ٹâ‚حٹO‚ة‚¾‚¹‚خژg‚¦‚é‚ب‚اپA‚ ‚»‚ر•û‚حچH•v‚µ‚ؤ‰؛‚³‚¢پB
ژہچغ‚ة‚â‚ء‚ؤ‚ف‚é‚ئپA‹@ٹB“¯ژm‚ھ—چ‚فچ‡‚¢پAƒMƒ„‚ھƒoƒٹƒoƒٹ‚ئ”ك–آ‚ًڈم‚°پA‚©‚ب‚è‚ج”——ح‚إ‚·پBژè‚ة•گٹي‚âڈ‚‚ًژ‚½‚¹‚ؤ‚ف‚é‚ج‚àپA–ت”’‚¢‚إ‚·پB
—V‚رڈI‚ي‚ء‚½‚çپAƒXƒCƒbƒ`‚حگط‚ء‚ؤ‚¨‚¢‚ؤ‰؛‚³‚¢پB“ء‚ة“dژq‰ٌکH‚جƒXƒCƒbƒ`‚ًپAڈء‚µ–Y‚ê‚邱‚ئ‚ھ‘½‚¢‚ج‚إپA’چˆس‚µ‚ؤ‰؛‚³‚¢پB
|
|
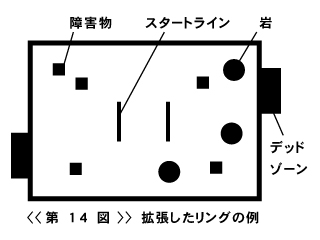
ٹg’£‚µ‚½ƒٹƒ“ƒO‚ج—ل
|
پyYouTube‚ج“®‰وپz
گشٹOگü‚ء‚ؤپAگl‚ج–ع‚إ‚حŒ©‚¦‚ب‚¢‚إ‚·‚ھپAƒfƒWƒJƒپ‚¾‚ئگش‚Œُ‚é‚ج‚ھ•ھ‚©‚é‚ج‚إ‚·‚ثپB
YouTube‚ج“®‰وپi‚R‚X•bپj
|