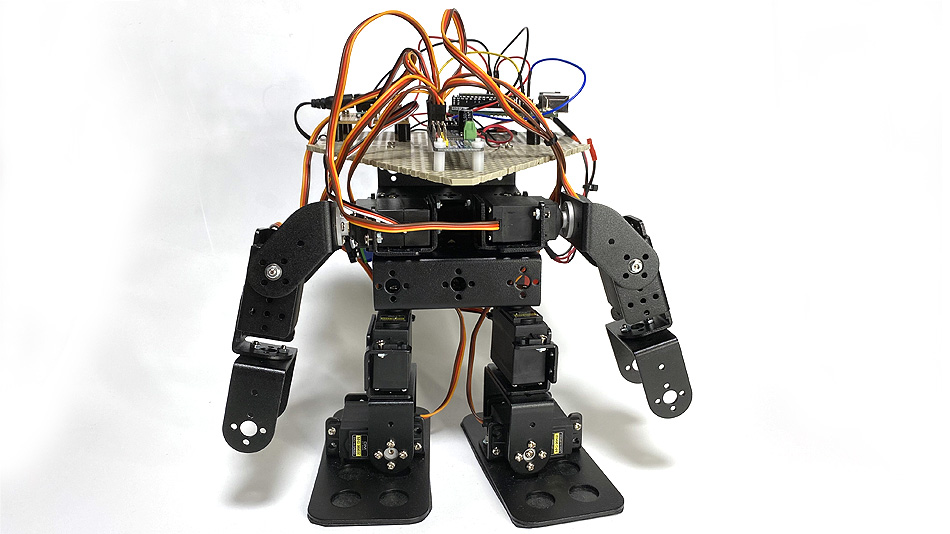
2004年、 近藤科学株式会社からサーボモーターを使った、2足歩行ロボット(KHR−1)が発売されました。
動 きは動画を見たほうが早いので、動画にしてみました。■決めポーズ ■お迎え ■2足歩行 ■ダンス歩行 VIDEO
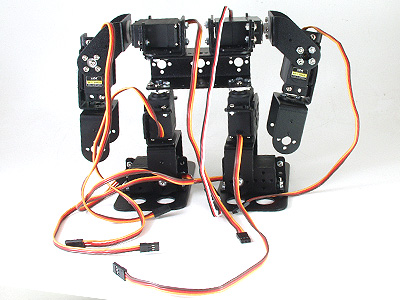
構 造材は、アマゾンで購入した構造材です。D DOLITY 8自由度 二足歩行ロボット DIY組み立て ヒューマノイド ダンスロボット ¥3931(税込、送料込) DiyStudio 6自由度ロボットアームDIYキットアルミメカニカルアームジョーArduinor MG995サーボドライブバルク ¥7599(税込、送料込) (手動サーボモータ DEN-L-089) を使用しました。
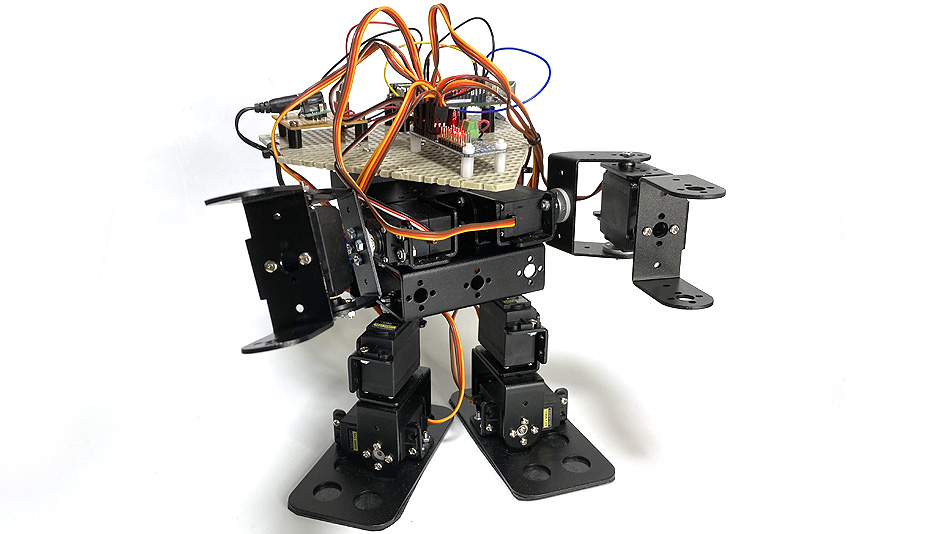
左肩は別のサーボモーターです。
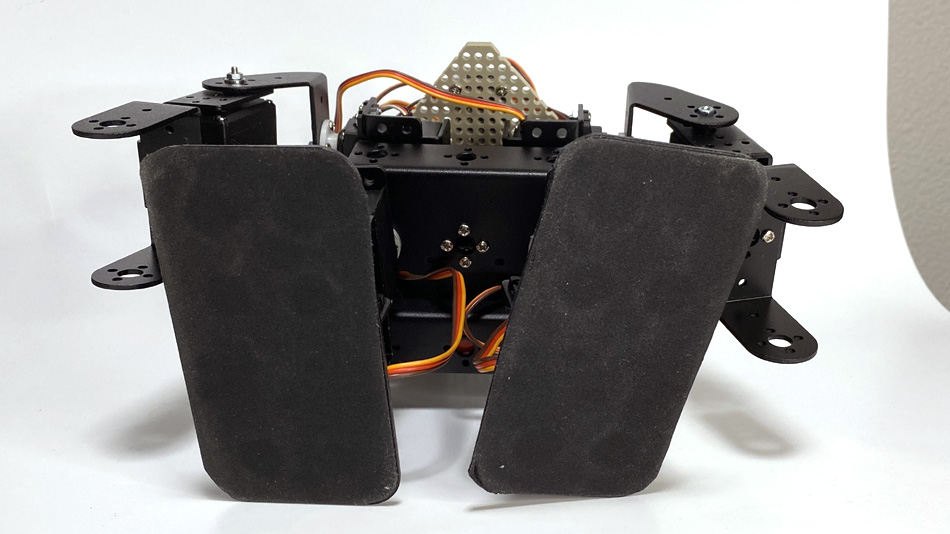
後ろ向きです。
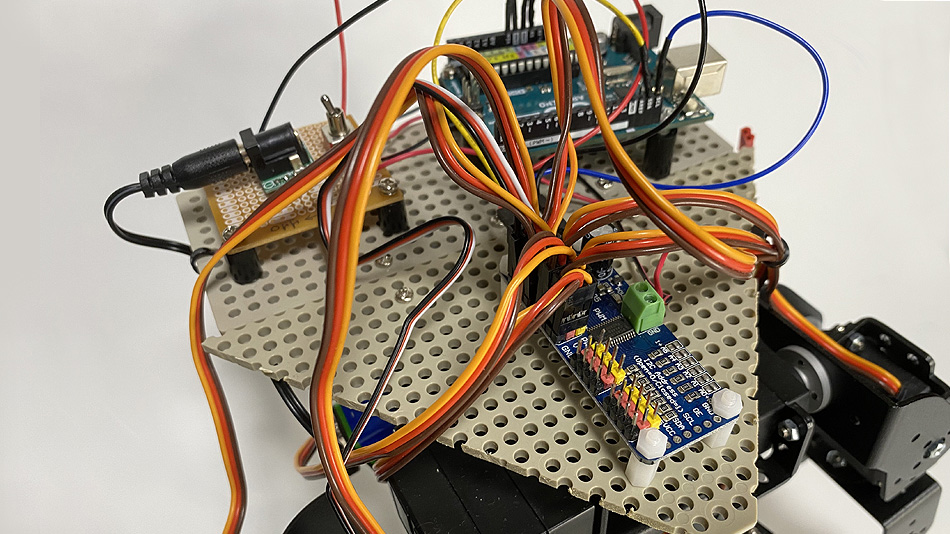
制 御回路は、Arduino UNO Rev3 (以下Arduino)を使います。I2C接続16チャンネル サーボ&PWM駆動キット が売っていますね)。VKLSVAN 2個 PCA9685 16チャンネル 12-ビット PWM Servo モーター ドライバー IIC モジュール Arduinoと互換 (2個¥999 税込 送料込) ニッケル水素充電池 です)。
サーボモータ用の、ニッカドバッテリー(6V 600mA)です。
Arduinoとサーボモーターモジュール用のアルカリ乾電池9Vです。
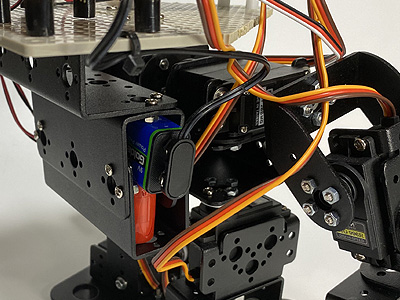
ロ ボット制作では、制御回路とバッテリーの置く場所に悩まされます。
モ ーションのプログラムは、時間がかかります。
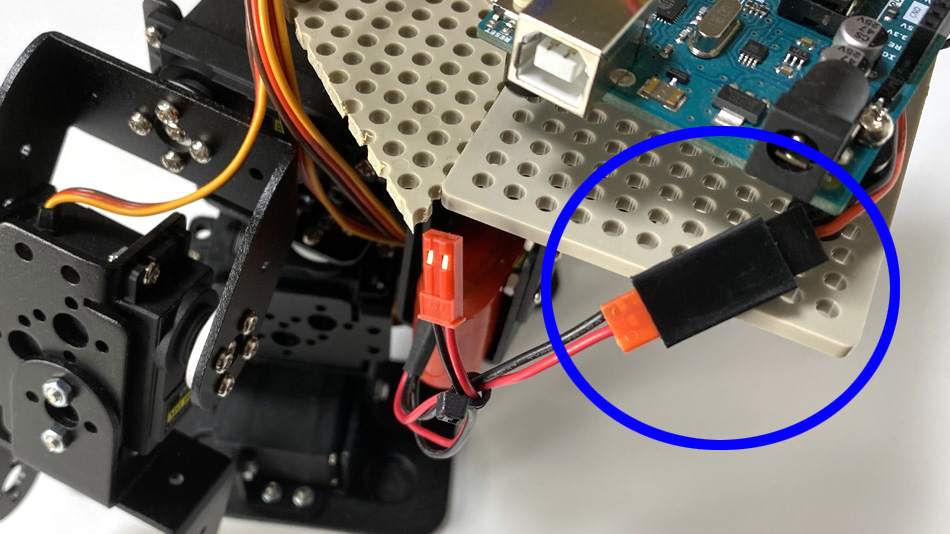
↑サーボモータの電源は、コネクタにして、バッテリーからも供給出来たり、ACアダプターからも供給出来るようにしています。 ロ ボットは暴走する事が良くあるので、キルスイッチを入れています(バッテリー動作時のみ)。
総 評

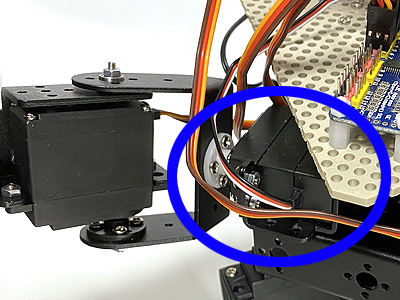

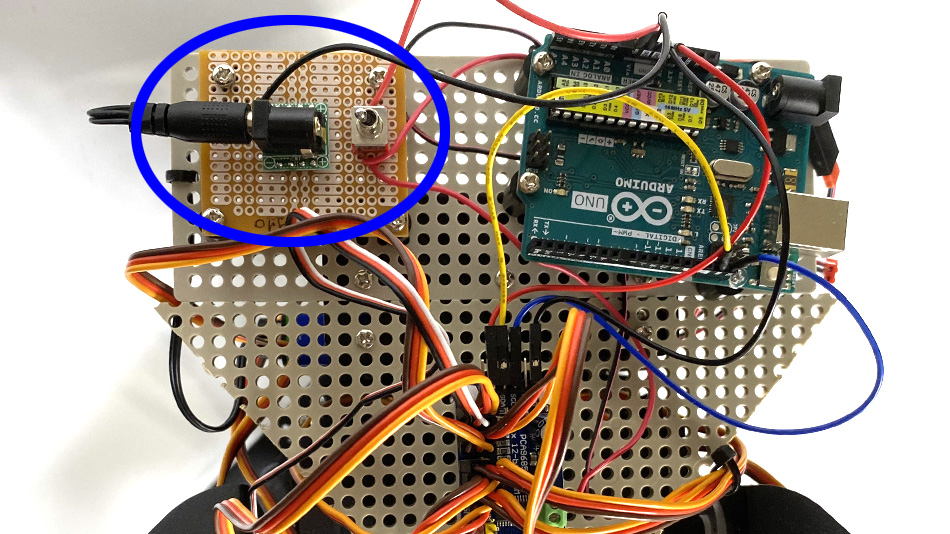 ↑ロボットを停止させるキルスイッチ
↑ロボットを停止させるキルスイッチ