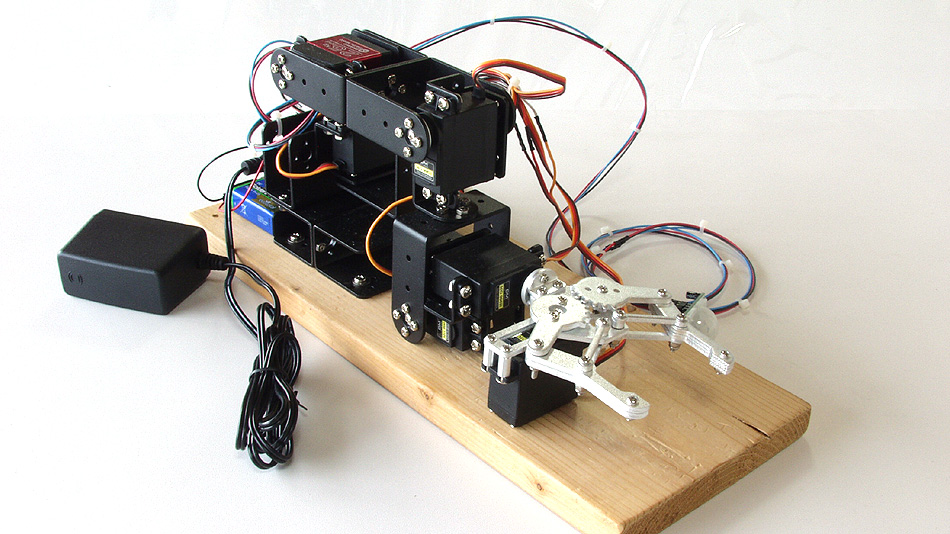
前 回に(秋月電子のロボットハンド) 懲りずに、またロボットハンドを作りました。アマゾン:DiyStudio 6自由度ロボットアームDIYキットアルミメカニカルアームジョー ¥7599
アマゾンでポチると、すぐにキットが送られてきました。
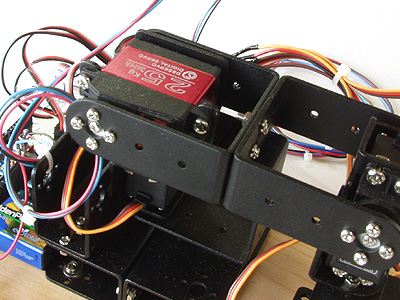
①ハードの制作 秋月電子:I2C接続16チャンネル サーボ&PWM駆動キット(K-10350) \950 )を考えますが、今回は必要ありません。
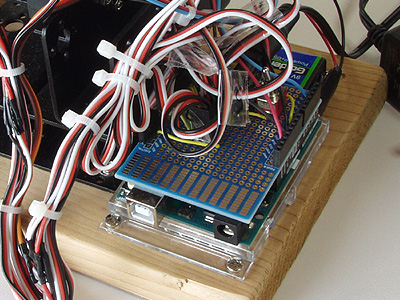
制御回路のArduino。デジタル端子の
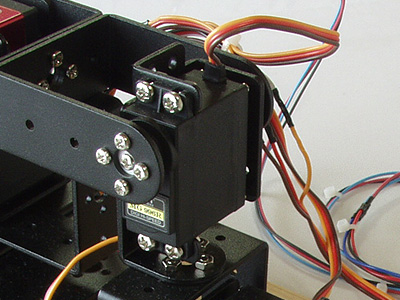
サーボモータは5V仕様
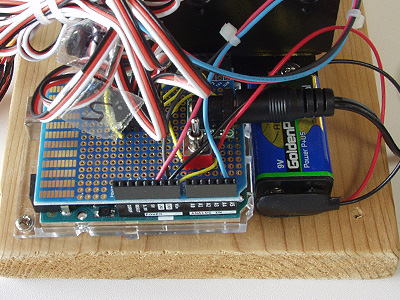
サーボモータの電源は
ACジャックをArduinoのシールドへ配置し、
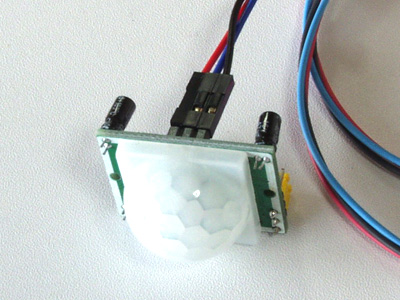
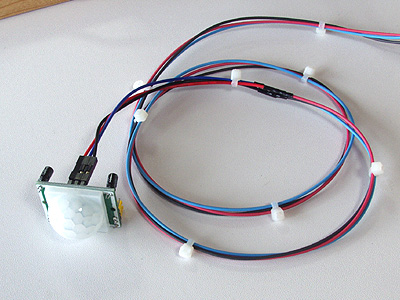
人が通ると反応する、焦電センサーです。
ロボットハンドから離れた場所に設置出来るように
②ソフトの制作 秋月電子:I2C接続16チャンネル サーボ&PWM駆動キット(K-10350) \950 問題は、静かに動作させるように、数値をいじる事です。 アマゾン:
DS3225* 25kg高トルク フルメタルデジタルステアリングサーボ 防水サーボ バハのラジコン対応 (270°)
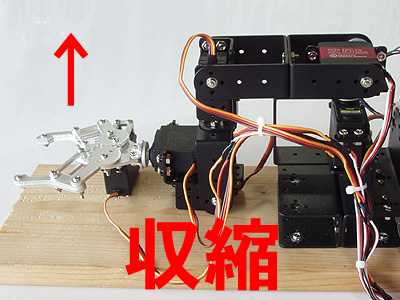
アームを上げるには、アーム全体を
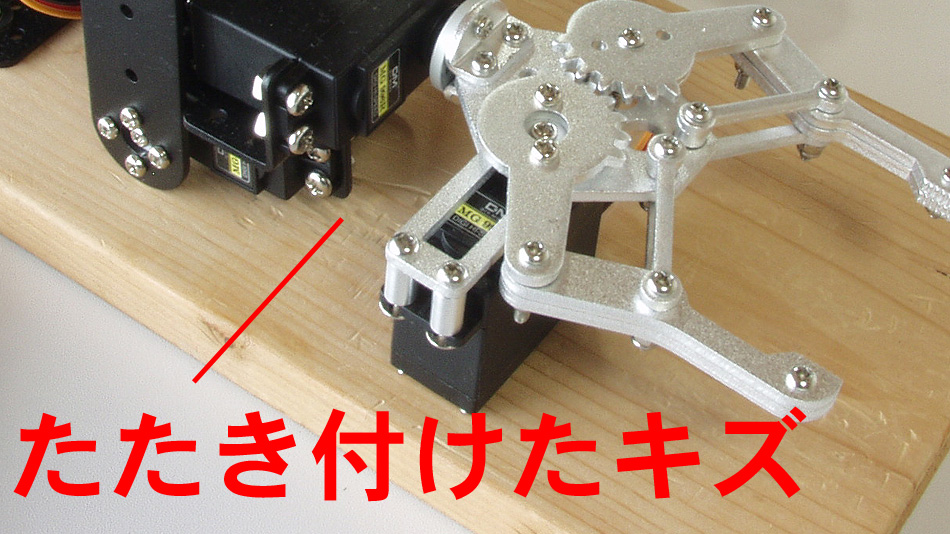
トルクがあるサーボモータ、
動画で分かるように、ロボットハンドの初めと終わりの動作は、制御を細かく指定し、アームの上下は収縮させているのが分かります。
【動画(1分38秒)】 VIDEO
自分が年を取った時、自分で作ったロボットハンドが、身の回りの世話を見てくれる時代は訪れるのでしょうか。
【書籍になりました!】
わかる!電子工作
月刊 I/O