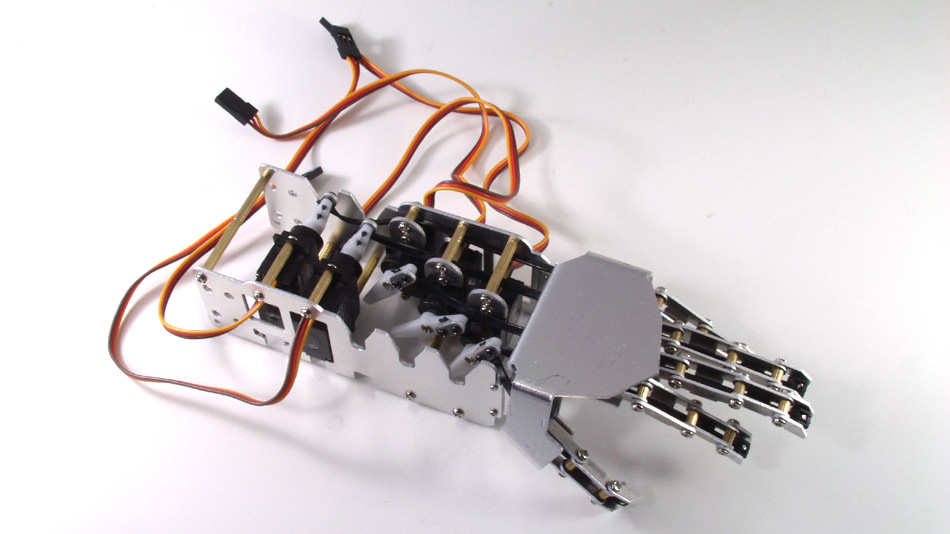
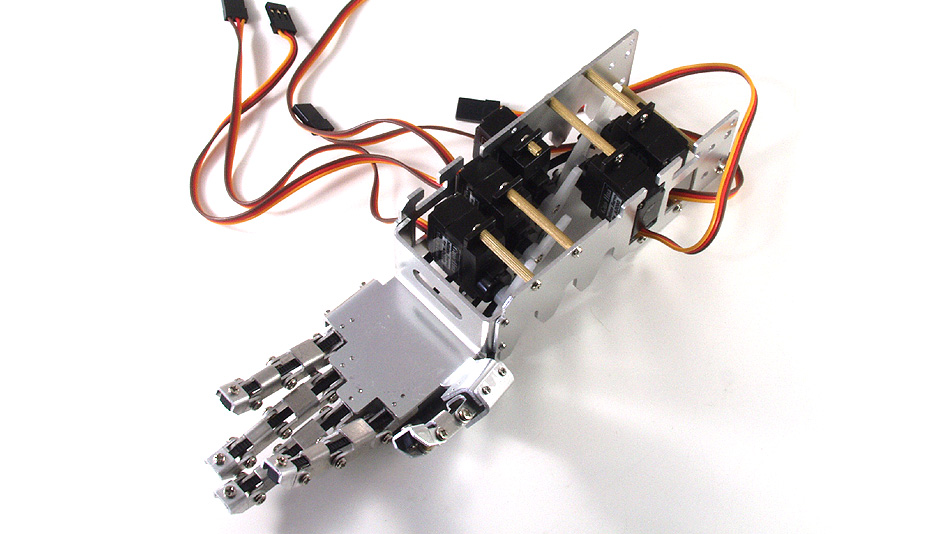
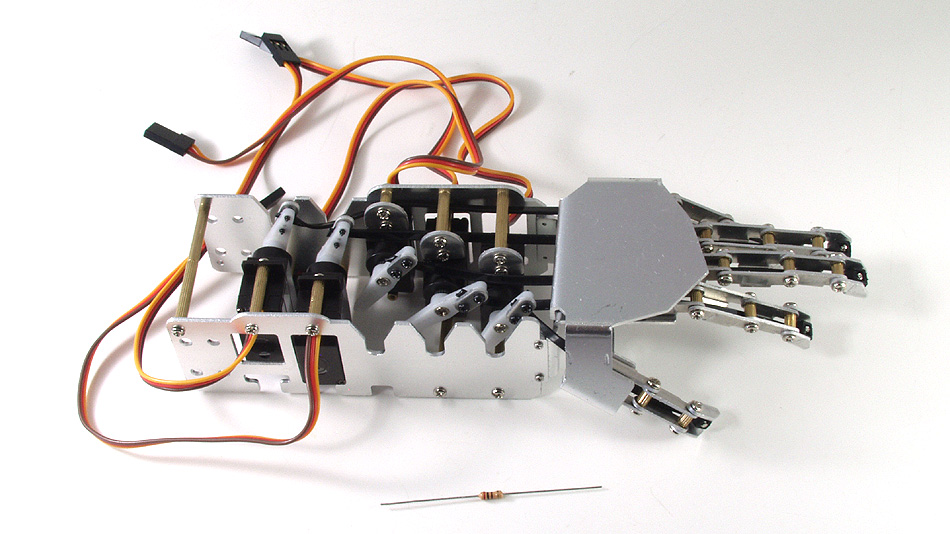
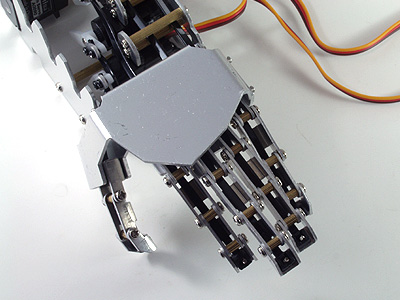
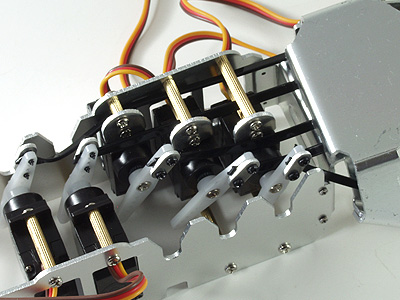
ロ ボットハンドを作りました。DIY 5フィンガー 左手 5Finger 101-20-158 K-12183 ¥6,480 です。①制作 ②出来上がり具合
指先から、結束バンドを入れ、固定します。
サーボモーターのホーンに
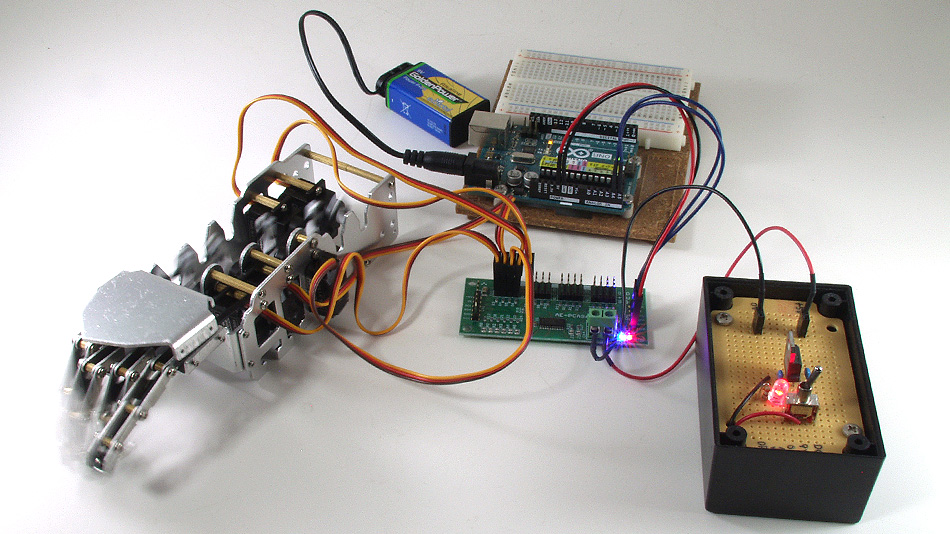
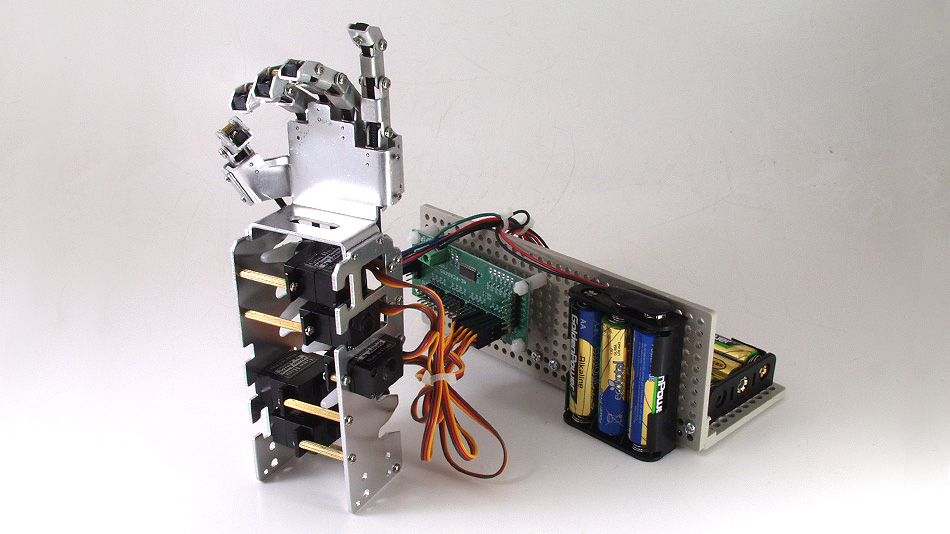
③I2C通信で動かす I2C接続16チャンネル サーボ&PWM駆動キット K-10350 ¥950 【 動 画 】 VIDEO
VIDEO
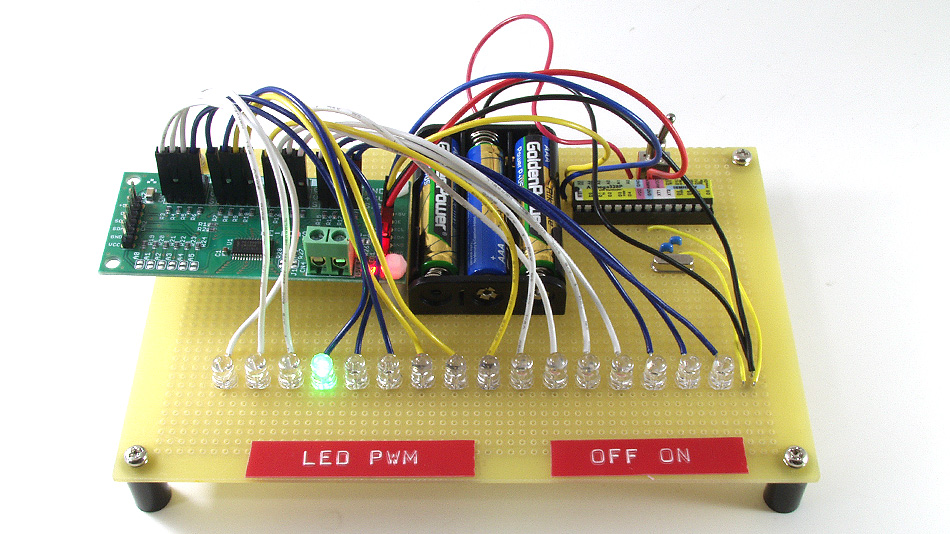
■ LEDをPWM制御してみる I2C接続でサーボモータを動かすキット 」ですが、IC自体は、本来LEDをPWM制御するためのものです。VIDEO