|
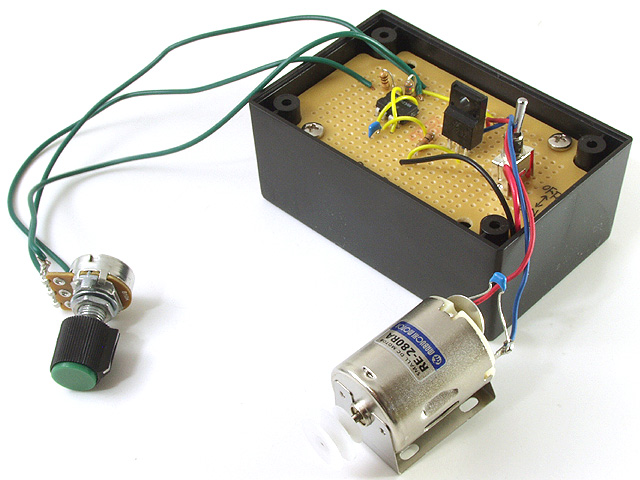
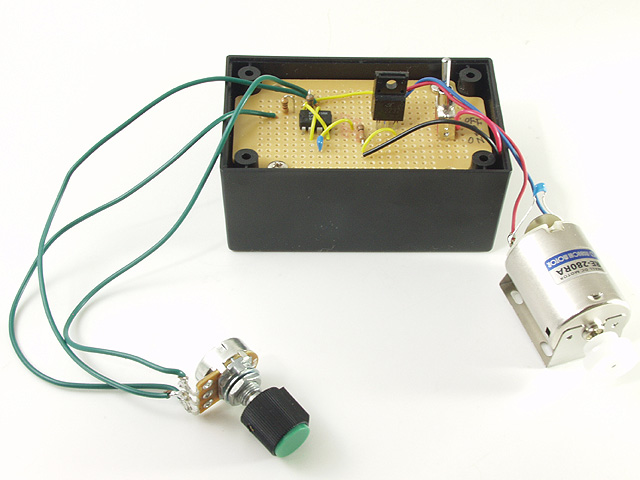
■手動DCモータードライバー
①モータの速度を調整する、手動のDCモータードライバー。
②速度の調整は、「PWM制御(Pulse Width Modulation)」と呼ばれる制御方式で、DCモータをコントロールします。
※厳密には、擬似的なPWM制御です。
③マイコンを使わないで制御するので、プログラムの知識がいりません。
④PWM制御に必要なパルスの発生は、タイマーIC555で無安定マルチバイブレータ回路を作り、発生させます。
⑤本キットは、「歩く速さを調整できる亀ロボット(DEN-D-013)」の回路に、少し手を加えたものです。
⑥マニュアルには、回路の動くしくみも記載しましたので、ぜひ参考にして下さい。
⑦PWM制御のため、完全にパルスを0(出力をOFF)にすることが出来ませんが、負荷がモータで重いため、モータは止まります。
⑧DCモータも付属しています。

¥2,980(税込)
DEN-L-093
全長 W54mm×D84mm×H35mm
(テイシン TB-2ケース)
【電子キット製】
お買い求めはこちらです。
|