|
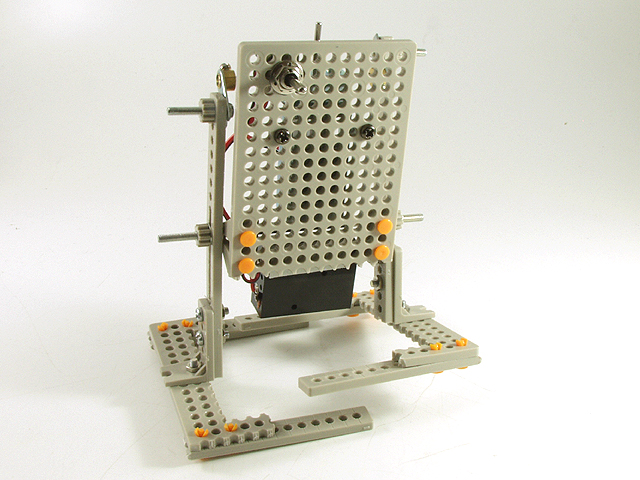
■揺動スライダークランク機構(2足歩行ロボット)
①揺動(ようどう)スライダークランク機構を利用し、DCモータ1つで、足を上げて歩く、2足歩行ロボットです。
②この機構を利用した2足歩行ロボットは、昔からおもちゃに利用されているため、目にしたことが多いと思います。
③本キットは、カバーや装飾部分を排除し、構造材だけで構成されているため、揺動スライダークランク機構を使って、歩くしくみが分かります。
④揺動スライダークランク機構は、クランクが回転しスライダーが雨粒のような運動をする機構で、代表的なリンク機構の1つです。
⑤電源は、単5乾電池2本(DC+3V)です。
⑥本キットは、材料を切り出し、組立を行なうキットです。加工自体は簡単な加工に分類されますが、初めて加工を行なう方にとっては、ちょっと難しいかもしれません。

¥4,120(税込)
DEN-K-001
お買い求めはこちらです。
|
|
・ |
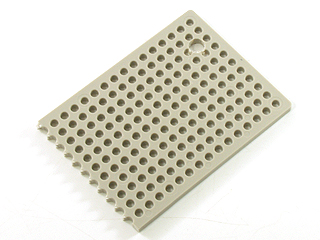
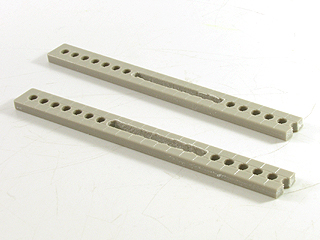
本体、脚部等は、ユニバーサルプレート、ユニバーサルアームです。
材料の切り出しや締め付けを、ご自身で行なう必要があります。 |
・ |
電源は、単5乾電池2本(DC+3V)です。別途ご用意下さい。 |
・ |
組立の際は、次の道具をご用意下さい。
ハンダゴテ、ヤニ入りハンダ、ニッパー、プラスドライバー、ラジオペンチ、ワイヤーストリッパー、両面テープ(ホットボンドでも可)、ヤスリ、金ノコ、φ65mmを開けるドリル |
・ |
本キットはご自身で、材料の切り出しや、金具の締め付けを行ないます。
そのため、出来上がりに個人差が出ることを、予めご了承の上、ご購入下さい。 |
|
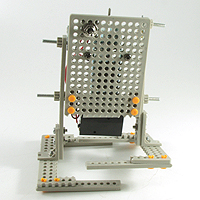
足をあげて、2足歩行で歩きます。
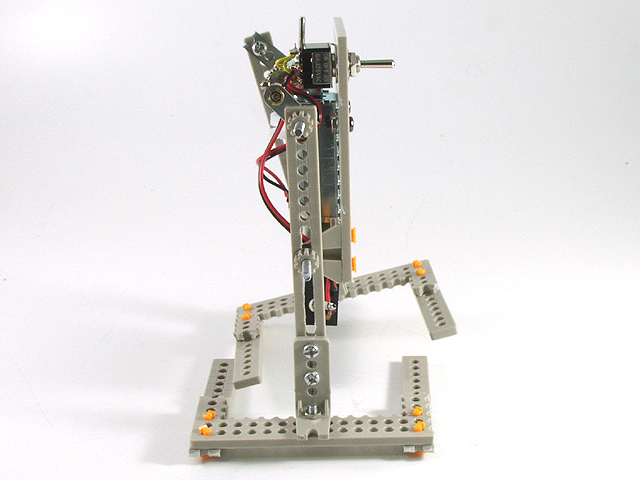
揺動スライダークランク機構になっているのが
分かります。
|
【揺動スライダークランク機構について】
揺動スライダークランク機構は、スライダークランク機構の中の1つです。
詳しい内容は、説明書を見て下さいね。
【2足歩行ロボットについて】
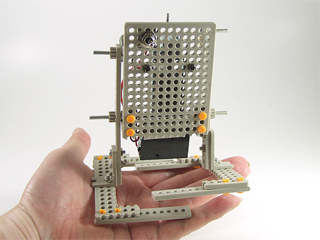 ←手のひらサイズです。 ←手のひらサイズです。
操作の仕方は、トグルスイッチを倒すことにより、揺動スライダークランク機構で、前進又は後進します。
トグルスイッチの中間点は、停止(電源OFF)です。
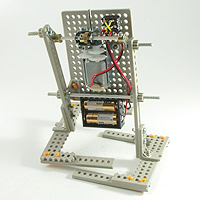
回路は、Hブリッジ回路です。
Hブリッジ回路については知りたい方は、当店のキットの「Hブリッジ回路(DEN-L-031)」説明を参考にして下さい。
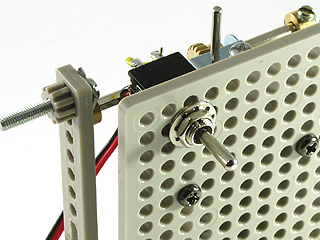
トグルスイッチ。 |
|
回路は、Hブリッジ回路です。 |
ロボットの組立には、材料加工が必要です。
トグルスイッチの取り付けの箇所に、ドリルやリーマで、穴(φ65mm)をあけて下さい。
脚部は、ラジオペンチ、ニッパー、ヤスリなどを使い、ガイド作成を行いますが、結構大変です。
他にも下のような加工が必要です。
加工に慣れていない方にとっては、非常に大変かもしれません。
でも、加工としては、簡単加工の分類なので、慣れてしまえば、すぐ加工できるようになります。
|
|
|
φ65mmを開ける必要があります。 |
|
ガイドの作成 |
| |
|
|
|
|
|
六角シャフトの切断も必要です。
パイプカッタを使うと
非常に簡単です。 |
|
クランクアームの加工は、
万力で挟んで折ると簡単です。
|
| |
|
|
|
|
|
ユニバーサルプレートは、
ニッパーで簡単に切れます。
|
|
ユニバーサルアームも、
ニッパーで簡単に切れます。 |
【YouTubeの動画】
YouTubeの動画(42秒)
揺動スライダークランク機構で、足をあげて、前進し、後進します。 |