|
■パソコンから操作する犬型ロボット
①パソコンのキーボード操作で、机の上を前後に歩く、犬型ロボットを作ります。
②動きは「前進・後進・停止」の3通り。前進は赤色、後進は緑色のLEDが発光、停止時は2つのLEDが消灯します。
③パソコンから犬型ロボットを操作するには、シリアル通信(RS-232C) を使います。
シリアル通信を行なうために、パソコン側にはTera Termなどの通信ソフト、犬型ロボット側にはPICマイコンを搭載し、通信します。
④動力部分は、タミヤのメカ・ドッグを使うので、難しい機械加工はありません。電子回路も、部品点数を減らし、出来るだけ簡単に作成できるようにしました。
⑤シリアル通信用のケーブル、D-sub9ピンオス-オスは、別途ご用意下さい。パソコンにシリアルポートがない場合は、USB-シリアル変換ケーブルをご用意下さい。
⑥本キットはシリアル通信とプログラムについては、解説していません。シリアル通信とプログラムについて知りたい場合は、当店のRS-232C受信機(DEN-L-066)をご購入下さい(本キットのプログラムと電子回路は、同じためです)。
⑦シリアル通信(RS-232C)で、モータ制御したい方に、最適です。


¥4,920(税込)
DEN-D-014
お買い求めはこちらです。
|
|
 |
月刊I/Oに執筆しました!
工学社 2017年 4月号の、
「シリアル通信で制御する パソコンから操作する犬型ロボット 前編」P70~P72の記事は、本キットです。
書籍と合わせて、ご覧下さいね。
アマゾンからのご購入はこちらです。
|
|
 |
月刊I/Oに執筆しました!
工学社 2017年 5月号の、
「シリアル通信で制御する パソコンから操作する犬型ロボット 後編」P70~P72の記事は、本キットです。
書籍と合わせて、ご覧下さいね。
アマゾンからのご購入はこちらです。
|
|
・ |
回路はユニバーサル基板で、配線図付きです。
細かい配線が多いので、工作技量が必要です。 |
・ |
プログラムはPIC16F88とC言語の組み合わせ、モータドライバーは、TA7267BPを使用しています。 |
・ |
電源は、制御回路とモータとも共通で、9V(角型乾電池 1本)です。
|
・ |
シリアル通信用のケーブル(D-sub9ピンオスーオス)は、別途ご用意下さい。パソコンにシリアルポートがない場合は、USB-シリアル変換ケーブルをご用意下さい。 |
・ |
パソコンの通信ソフトは、ハイパーターミナルやTera Termなどが必要です。 |
・ |
入っている商品は、タミヤの「メカ・ドッグ」と改造パーツ、改造するさいの説明書一式です。
電池(角型乾電池 1本)は付属していないので、別途お買い求め下さい。
|
|
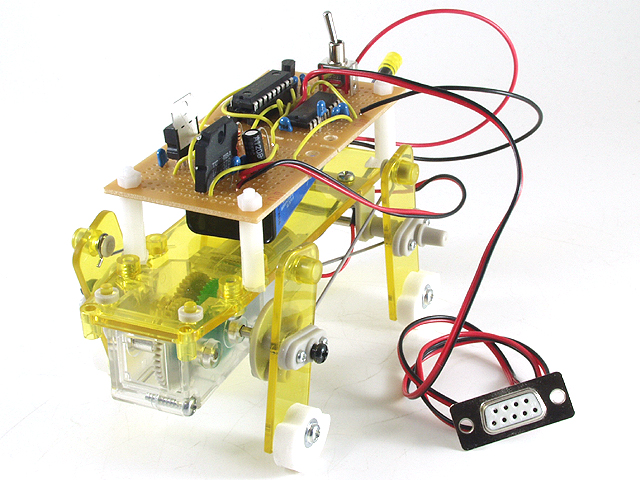
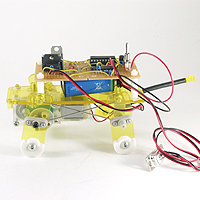
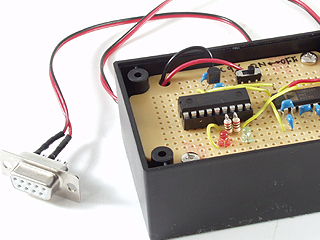
モータードライバーを搭載しているので、電子回路はコンパクトです。
受信用のシリアルポート(D-sub9ピンメス)を、搭載しています。
|
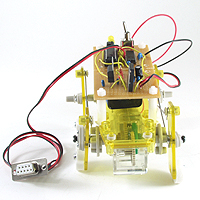
【パソコンから操作する犬型ロボットについて
改造するのは、タミヤのメカ・ドッグ。
このキットのモータに、シリアル通信の回路をつけ、パソコンから操作できるようにします。
モータの制御は、モータードライバーを使って制御しています。
モータードライバーの出力電圧が高いため、結構なスピードであるきます。
そのため狭い机では、あっ!というまに、机の端にいきます。

改造する、タミヤのメカ・ドッグ。 |
|
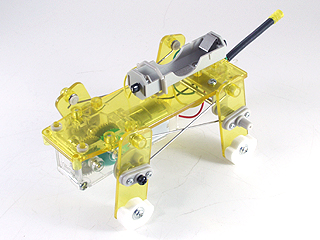
どう見ても、犬に見えないのですが。
ブルドックでしょうか?
|
パソコンと通信するので、PICマイコンを使い、通信を制御しています。
通信の部分は、当店の「RS-232C受信機(AUSART)
DEN-L-066」の回路を、そのまま使っています。
そのため、本キットは、シリアル通信についてと、プログラムの説明を、一切していませんので、シリアル通信に興味がある場合は、本キットではなく、「RS-232C受信機(AUSART) DEN-L-066」を、お買い求め下さい。
本キットの電子回路は、「RS-232C受信機(AUSART) DEN-L-066」に、モーター制御ができるように、モータードライバーを追加した回路です。
本キットは、モータドライバーに重きをおいたキットなので、説明書には、モータードライバー(TA7267BP)の説明を、記載しています。
|
|
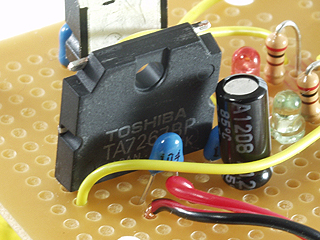
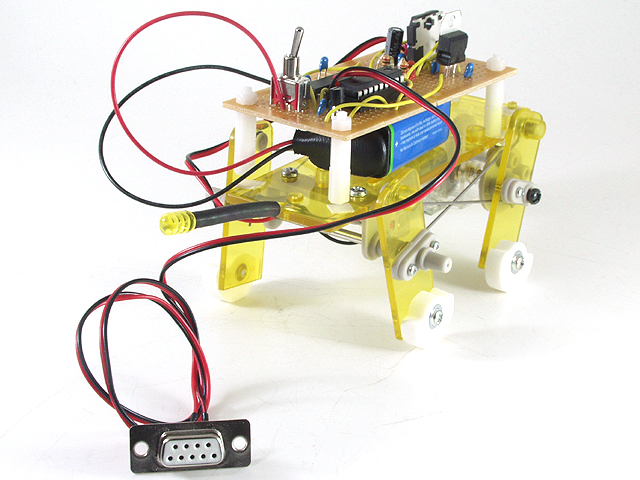
手前の大きい半導体が、
モータードライバー(TA7267BP)です。 |
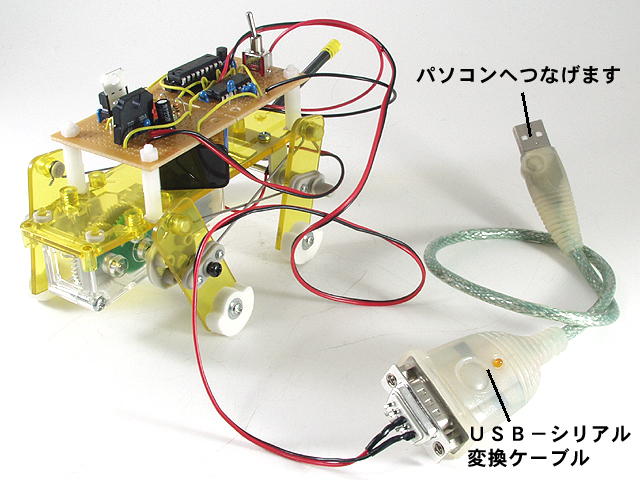
パソコンとの接続方法は、シリアルケーブルを使います。
下の写真は、シリアルポートを持っていないパソコンで使う、USB-シリアル変換ケーブルをつけたところです。
モータ用のレギュレターや、モータードライバーには、熱を下げるヒートシンクはつけていません。
これは、机の上で歩行するため、長時間歩かないので熱くならず、つける必要は無いと判断したためです。
犬型ロボットの操作方法は、パソコンの、Nキーで前進、Mキーで後進、その他のキーは、停止します。
その際、背中の発光ダイオードは、前進すると赤色だけ発光、後進すると緑色だけ発光、停止で2つとも消灯します。

ヒートシンクをつけていないので、
長時間使用すると、熱くなります。 |
|
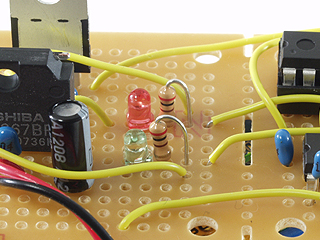
前進で赤色、後進で緑色が点灯。
停止で消灯。
|
【拡張1 歩く速度を調節できるようにする!】
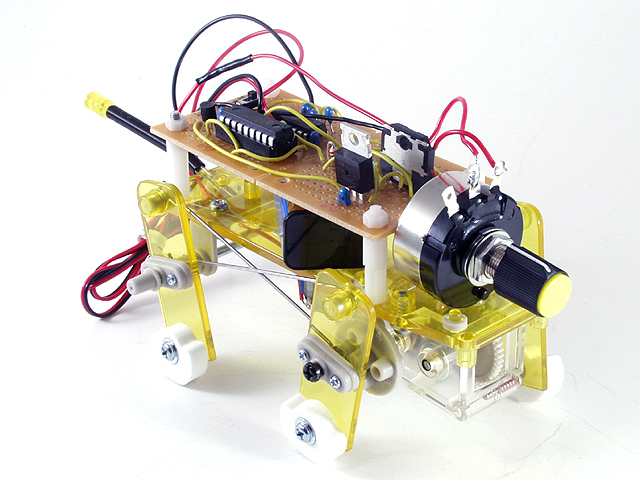
↑1Wの可変抵抗器を取り付けたところ(右側の一番大きな部品です)
歩く速度が早いので、可変抵抗器を、モータとモータドライバーの間に取り付けると、可変抵抗器で、歩く速度を調節することが出来るようになります。
可変抵抗器は、定格電力1Wのものを使用して下さい。
【拡張2 通信ソフトを自分で作る!】
「ハイパーターミナル」や「Tera Term」などの通信ソフトではなく、自分でプログラムを作り、本キットを動作させる事ができます。
下の画面がそれです。
ボタンを作り、各ボタンを押すと前進や後進します。
(このプログラムは、RS-232C受信機(AUSART) DEN-L-066 にも利用できます。)
●使い方
①通信ソフト(ハイパーターミナルやTera Term)の代わりに、作ったプログラムを実行します。
②「前進(赤色)」 や 「後進(黄色)」 をクリックすると、前進(点灯)や後進(点灯)します。
③「停止(消灯)」で、停止(消灯)します。
④「終了」は、アプリケーションの終了です。
●開発環境
プログラム言語 : HSP3.3
OS : Windows
シリアル通信ポート5で作られているので、適宜、ご自身のパート番号に合わせて下さい。
hspext.dllを使っているので、実行ファイルを作った時は、忘れないで同じフォルダー内において下さい。
ソースファイルは、RS-232C受信機(AUSART) DEN-L-066のマニュアルに記載されているIDとパスワードを使い、RS-232C受信機(AUSART)のプログラムと一緒に、ダウンロードする事ができます。
一緒にダウンロードできたら、次のファイルを使用します。
serial_dog.hsp ; ソースファイル
serial_dog.exe : 実行ファイル(ポート5でないと、動きません)
hspext.dll : 実行ファイルを実行する時に、必要なファイルです
【YouTubeの動画】
YouTubeの動画(22秒)
画面だと分かり難いですが、パソコンのNキーで前進、Mキーで後進しています。
NキーとMキー以外で、停止させています。
|