① リモコン使い、前進・後進・停止の切り替えができ、歩行速度も調整できる、亀ロボット。無安定マルチバイブレーター(555タイマIC)「DEN-L-060」が基本回路です。 )を作り、発生させます。 リモコンケースも加工が容易な、丸穴加工(φ5mm、φ6.5mm、φ7mm、φ16.5mm)です。 加工の際は、道具が必要なので、ご自身でご用意下さい。 DEN-D-013お買い求めはこちらです。
執筆しました ! アマゾンからのご購入はこちらです。
・
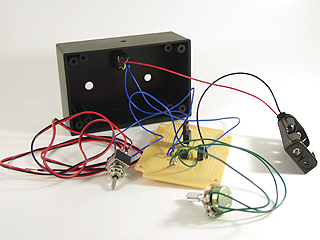
回路はユニバーサル基板で、配線図付きです。
・
電源は、制御回路とモータとも共通で、3V(単4乾電池2本)です。
・
ボリュームで、パルスを調整しますが、完全にパルスを0%~100%することは出来ません。
・
PWM制御は、簡易PWM制御のため、ボリュームを回すと、デューティー比の他に、周期も変化します。
・
入っている商品は、タミヤの「メカ・タートル」と改造パーツ、改造するさいの説明書一式です。
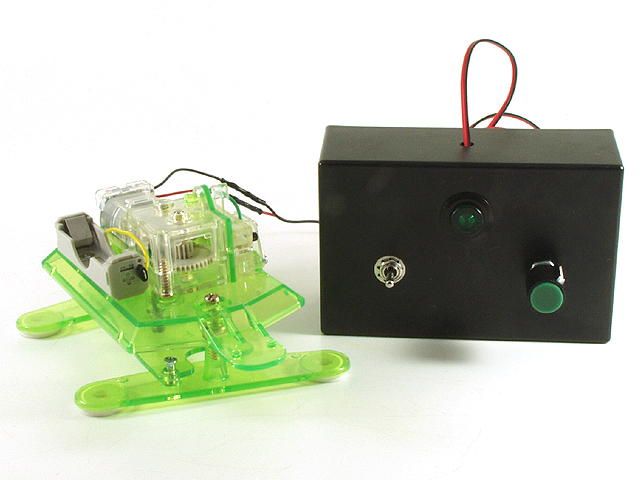
リモコンボックスで、亀ロボット(DCモータ)の
速度が調節できます。
電子回路、電源など、すべてリモコンボックスへ集約。
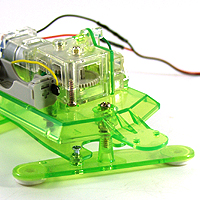
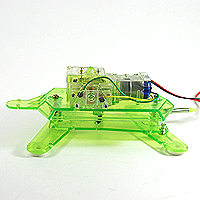
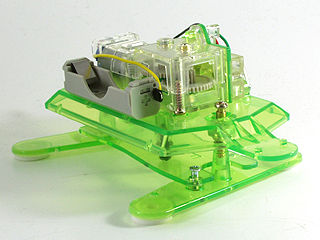
改造する、タミヤのメカ・タートル。
はって(クロール歩行)で歩きます。
電子回路は、555タイマーICを使い、無安定マルチバイブレータ回路を作成。無安定マルチバイブレーター(555タイマIC)「DEN-L-060」 が基本回路で、その応用です。 詳しい内容は、付属の説明書にびっしり書きましたので、ご覧下さいね。
電子回路は、空中配線と基板配線の
2種類を行ないます。
ボリュームを使って、
速度制御します。
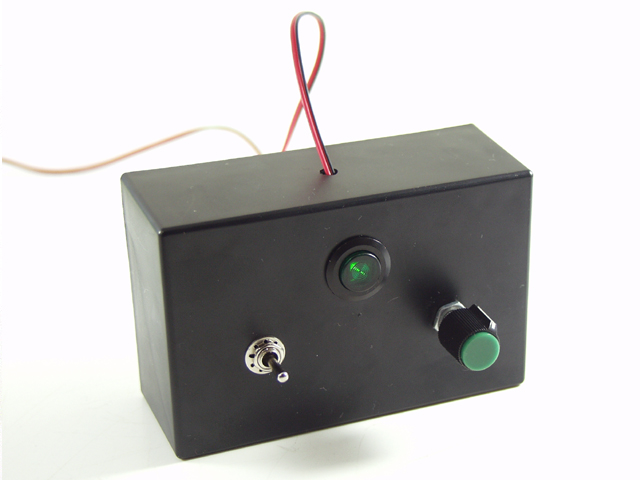
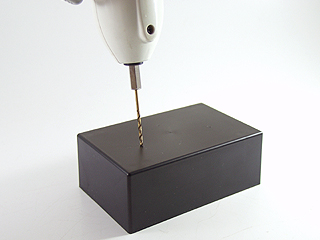
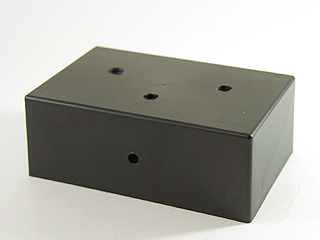
リモコンケースは、加工が容易な、丸穴加工です。
ケース加工もあります。
こんな感じで穴をあけていきます。
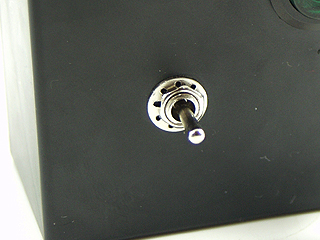
亀ロボットは、トグルスイッチで動かします。
中間でOFFのトグルスイッチです。
電源のプッシュスイッチ。
LED付きです。
【購入した方への、オマケの説明】
【YouTubeの動画】VIDEO YouTubeの動画(82秒)
亀とは思えない、結構なスピードで歩きます。