|
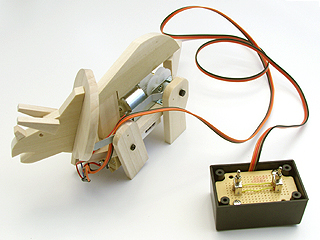
■トリケラトプス ロボット
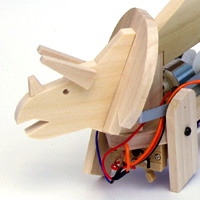
①タミヤのトリケラトプスを改造し、前後にリモコン操作出来るようにします。
②トリケラトプスは良くできていて、リンク機構と呼ばれる機構で、頭、尻尾、4本足を動かして進みます。
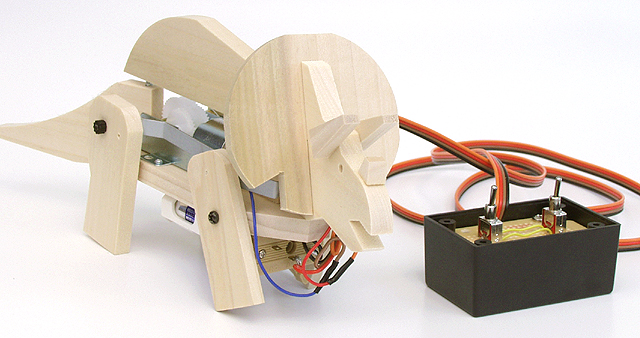
③リンク機構はモーターを、クラウンギヤを使い、回転軸の方向を変えます。
その後ギヤ枚数を増やし、減速比とトルクを得(回転速度を遅くして、パワーを上げています。)、180度ずれたクランクに伝えています。
さらにクランクの動力は、リンクロッドへ伝達され、4本足を動かしています。
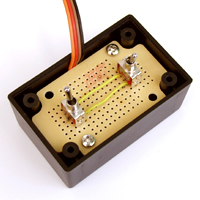
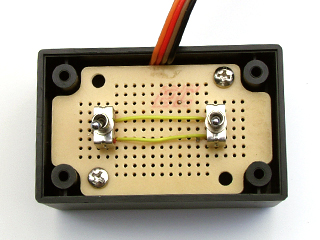
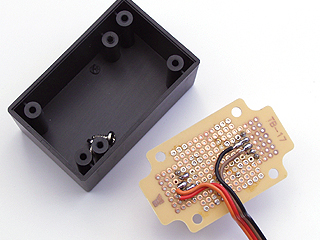
③リモコンはHブリッジ回路を作り、モーターを正回転や逆回転させ、トリケラトプスを前進、後退させます。
④Hブリッジ回路は、DCモーターを単一の電源で回転方向を変えることが出来る回路で、モータドライブ用の I Cの中には、このHブリッジ回路が使われています。
⑤自作ロボットを作りを始めたい方の、プチ改造にいかがでしょうか?(電子工作教室の教材としても使っています。)

¥3,780(税込)
DEN-D-001
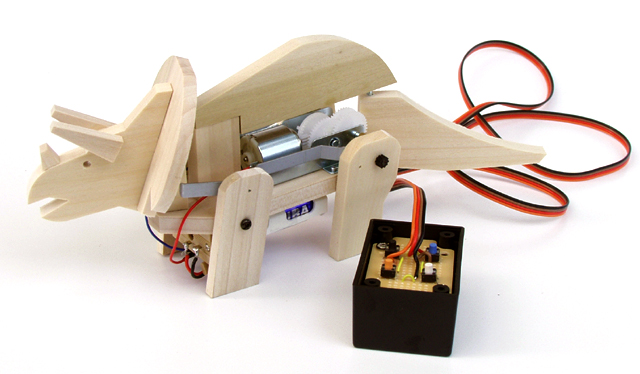
トリケラトプスの完成時の
全長262mm、全幅67mm、全高103mm。
お買い求めはこちらです。
|
|