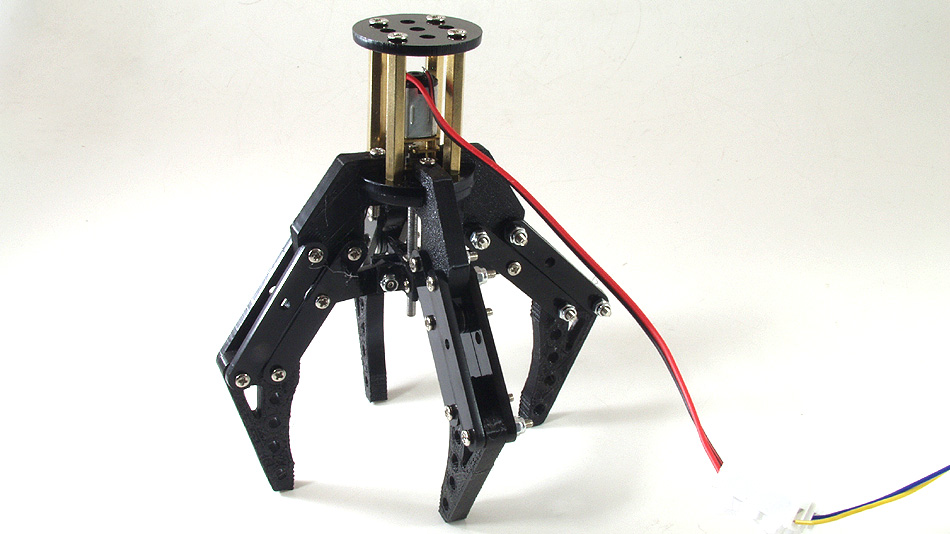
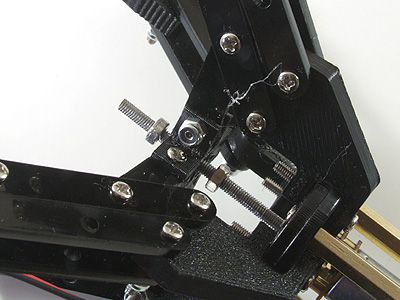
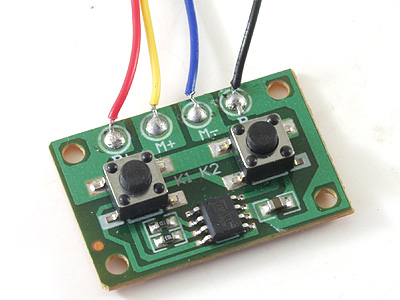
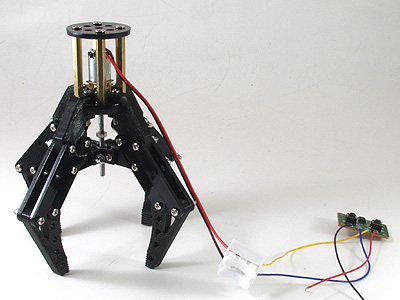
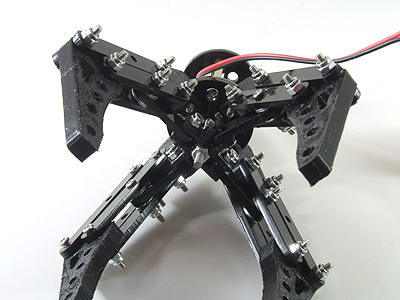
アリエクスプレスで購入した、ロボットハンド N20 1915円(税込)。 ロボットハンドはサーボモーターで動かす構造が多いですが、これはDCモータを使い、動かします。 ロボットのグリッパーやドローン用らしいです。 構造は、モータの回転軸にタップを切り、ねじを取り付けます。 ねじにアームを取り付け、ねじの移動により、アームを開閉させる仕組みです。 素材の加工を、3Dプリンターとレーザー加工で行っています。 一番大事な、ねじとアームの結合部分の部品を3Dプリンターで使っている為、精度が出ていない為ねじが上手く入りません。また、壊れそうです。 更に大切な重要部品、モーターの回転軸のタップが、つぶれていた為、ねじとアームの結合部分がねじ止め出来ず、ぐらぐらになっています。 制作時間は、3時間かかりました。 設計としては面白いのですが、設計を具現化出来る、機械加工精度が悪いので、教材として使えず残念です。 機構をの理解する教材として利用しようと思います。
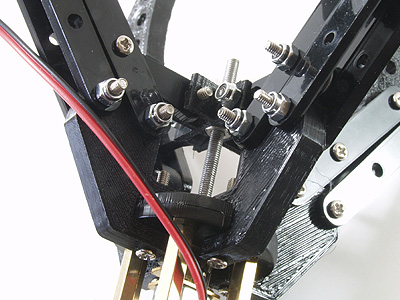
【動作している様子】 モータから出ている軸とアームの接続ががくがくです。
(2025年11月4日(火) 作成)