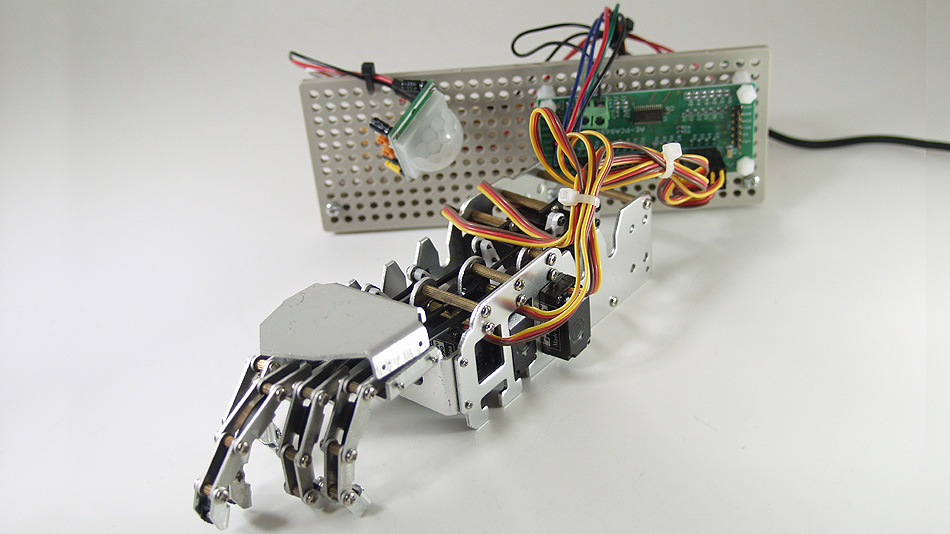
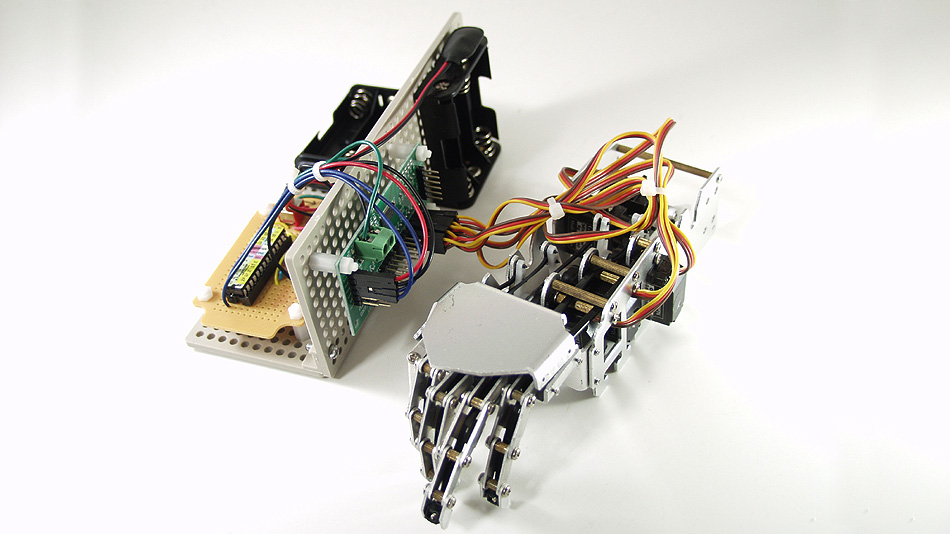
秋月電子で売っていたロボットハンドを改造してみました!
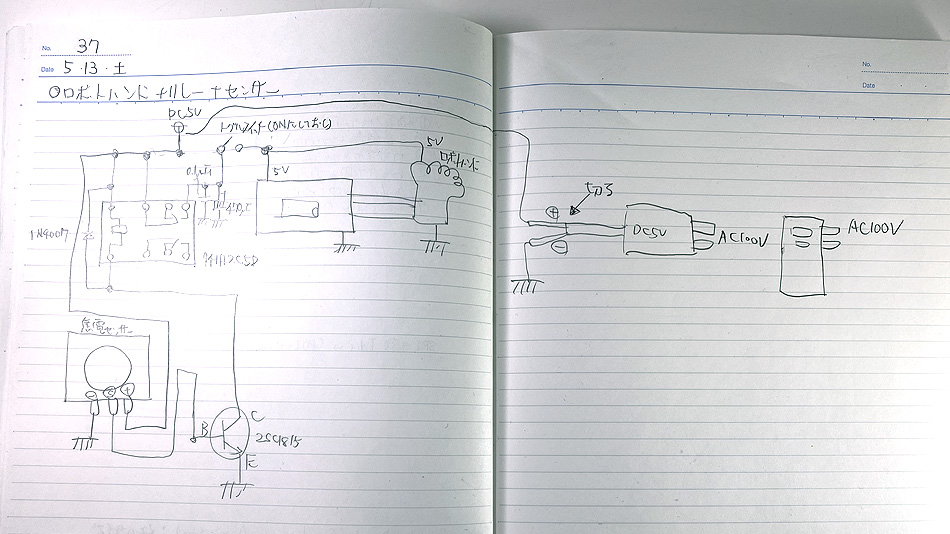
■電子回路
電 子回路は、上の写真の通りです。■改良後のロボットハンドの動画 焦 電センサーに反応すると、暫くするとロボットハンドが動きます。VIDEO
Contents are copyright (c) 2009 MASAKATSU BABA All rights reserved.こちらまで .