|
■PICサーボモータ
①ロボットやラジコンで使われている、サーボモータを動かしてみましょう。
②サーボモータを動かすには、サーボモータへ、ある周期であるパルス幅の信号を入力してあげます。
③この信号を作るのが結構大変で、本キットではPICマイコンが持っている、CCP機能のPWMモードを利用しています。
④CCP機能のPWMモードを利用した制御方法は、オーソドックスな方法なので、ぜひ身につけて欲しい技術です。
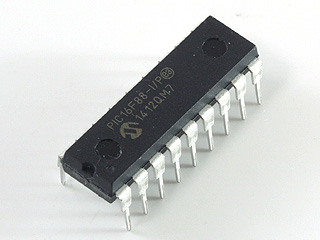
⑤本キットのPICマイコンは、PIC16F88で、開発言語はC言語です。
⑥プログラムを書くソフトや、PICマイコンへプログラムを書き込む道具などの開発環境は、ご自身でそろえる必要があります。
⑦ハンダ付けの制作時間は、20分くらいです。
⑧サーボモータ1個付きです。

¥3,120(税込)
DEN-L-088
全長 W54mm×D84mm×H35mm
(テイシン TB-2ケース)
【電子キット製】
お買い求めはこちらです。
|
・ |
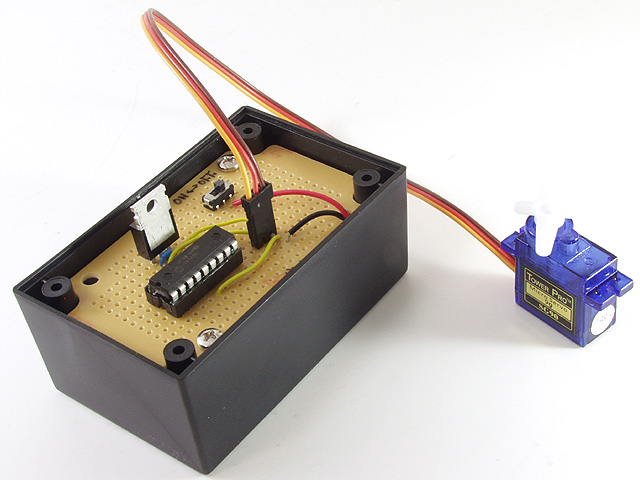
回路図を見ながら、ユニバーサル基板でハンダ付けします。
|
・ |
PICマイコンは、PIC16F88です。 |
・ |
電源は、角型乾電池 9V 1本 です。
乾電池は、別途ご用意下さい。
|
・ |
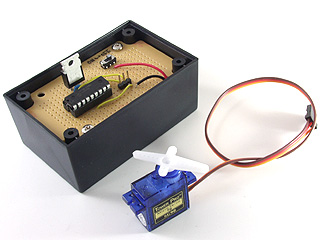
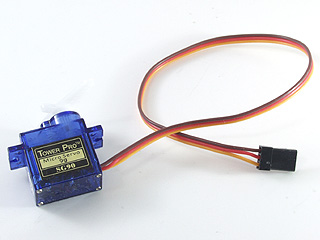
サーボモータは、1個付属しています。 |
・ |
本キットの理解には、PIC16F88マイコンの知識が必要です。 |
・ |
制作時間は20分くらいです。 |
|
サーボモータも付属しています。
|
【本キットについて】
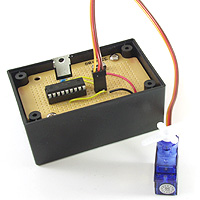
本キットは、PIC16F88マイコン、レギュレター、サーボモータの回路で出来ている、非常にシンプルな構成です。
実際の電子工作では、複数のサーボモータを動かすことが多いと思いますが、、とにかくサーボモータ1個を動かして見たい方に最適なキットとなっています。
複数のサーボモータを動かすには、本キットを雛形に、発展させて下さい。
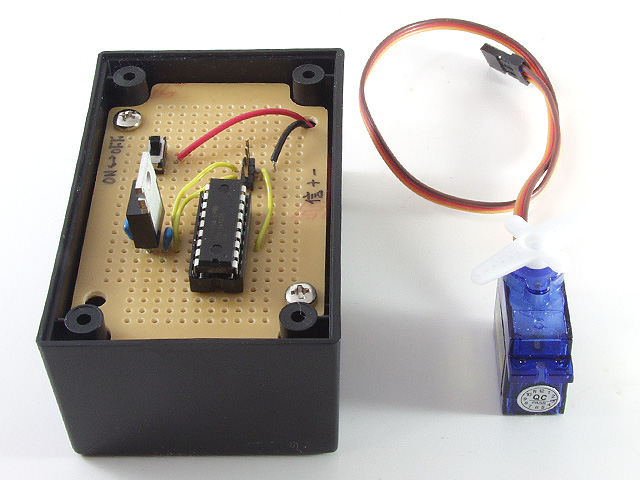
サーボモータは、取り外しできます。l
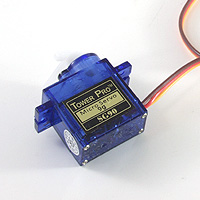
サーボモータは、SG90と呼ばれるもので、動作電圧4.8V(~5V)で、トルク1.8kgf・cmと低いです。
このモータの配線は、
赤 : プラス電源
茶色 : マイナス電源
オレンジ色 : 信号線
です。
一般的なサーボモータと同じ、20msの周期で、パルス幅1ms~2msで動きます。
そのため、他のサーボモータを取り付けても、動くと思います。
通常、サーボモータと制御回路(PICの回路)は、別電源にするのですが、本キットは複雑になるのをさけるため、同じ電源(DC+5V)を利用しています。
可動角度は、一般的なサーボモータと同様に、120度(左右60度)です。
でも、自己責任になりますが、180度(左右90度)まで、動きました。
レギュレターは、サーボモータと制御回路が共用なので、沢山電流が流せるタイプにしています。
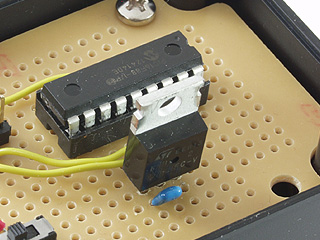
PICはおなじみの、PIC16F88マイコンです。
あらかじめ、中央 → 右回転 → 中央 → 左回転 の順番で動くプログラム済みです。
【プログラムについて】
PIC16F88マイコンは次の環境で、C言語でプログラミングしています。
マイコン開発ソフト : マイクロチップ社のMPLAB IDE v8.60(無料)
HI-TECH ANSI C COMPILER
書き込み環境 : 秋月電子通商のPIC ProgrammerV4
ソースファイル : servomotor.c
hexファイル : servomotor.hex
パソコン環境の調整 : プロジェクトファイルは、ファイル名だけでなくパスも、すべて半角英語(日本語はNG)。
【プログラムのダウンロード】
プログラム等は、こちらからダウンロードして下さい(ZIPファイル 1.2kB)。
ポップアップブロックされて、ダウンロードが始まらない場合は、CTRLキーを押しながら、クリックして下さい。
ダウンロードする際に聞かれる 「IDとパスワード」は、マニュアルに記載されています。
|