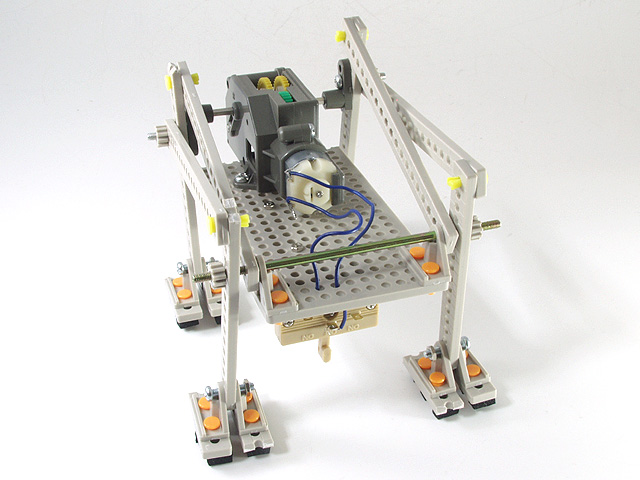
■4足歩行(てこクランク機構)
①てこクランク機構を4つ利用した、4足歩行ロボットです。
※本キットはご自身で、材料の切り出しや、金具の締め付けを行ないます。そのため、出来上がりに個人差が出ることを、予めご了承の上、ご購入下さい。
DEN-K-013
お買い求めはこちらです。
・
本体、継手は、ユニバーサルプレートです。
・
電源は、単3乾電池2本(DC+3V)です。別途ご用意下さい。
・
組立の際は、次の道具をご用意下さい。
・
本キットはご自身で、材料の切り出しや、金具の締め付けを行ないます。
【本キットについて】
【YouTubeの動画】VIDEO
4足歩行で、のしのし歩いているのがわかります。