|
■火星ローバー
①千葉県で年1回開催されている、火星ローバーコンテスト。
②小学生や中学生が、日ごろの技術を駆使し、思い思いのローバーを作り、参加する大会です。
③本キットは、コンテスト向けのローバーを作ります。
④ローバーは、「走行、ステアリング、アーム上下、つかむ」の基本的な構造だけで出来ているので、このローバーに機能を追加し、オリジナルのローバーに仕上げて下さい。
⑤操縦は、リモコン4チャンネル(モータ4つの制御)です。
⑥材料は、板やボルトなので素材を使い作るので、ロボット工作の技術が、知らない間に身に付きます。
⑦技術的に高度な内容で出来ているので、学校教材としても最適です。
⑧工作の際、シャフトを切る道具、万力、ハンダゴテが必要ですが、工作技量はそれほど必要ありません。
⑨メカトロニクス工作の、基本の基本工作なので、将来技術者を目指すお子様には、絶対作って欲しいキットです。

¥24,800(税込)
DEN-D-016
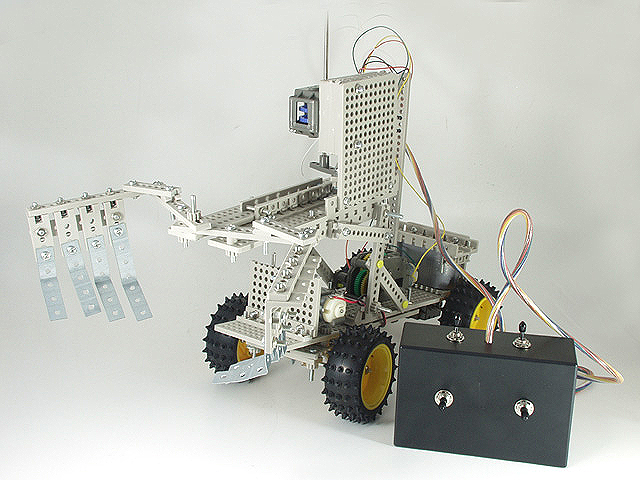
全長400mm、全幅140mm、全高260mm。
お買い求めはこちらです。
|
|
・ |
電子回路は空中配線です。 |
・ |
モーター4つで、走行、ステアリング、アーム上下、つかむ 動きをします。 |
・ |
電源は、4.5V(単4乾電池3本)が必要です。別途ご用意下さい。
|
・ |
機械部品は、タミヤの部品を使用しているので、比較的簡単に、組立られます。 |
・ |
大きさは、全長400mm、全幅140mm、全高260mmです。
さらに、重しも搭載しているので、結構な重さになっています。
|
・ |
ロボットですが、プログラム知識は必要ありません。 |
・ |
組立の際、工作加工があります。
シャフトを切断できる道具(糸のこ、パイプカッターなど)、万力が必要です。
|
|
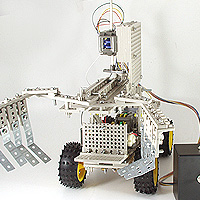
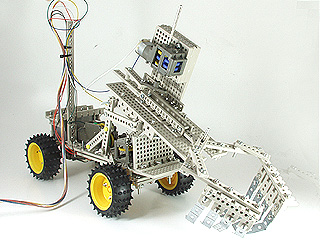
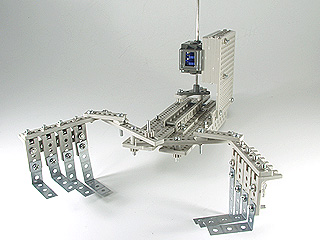
「前後、左右、アーム上下、つかむ」 と、メカトロニクス工作の
基本がぎっしり、つまったキットです。
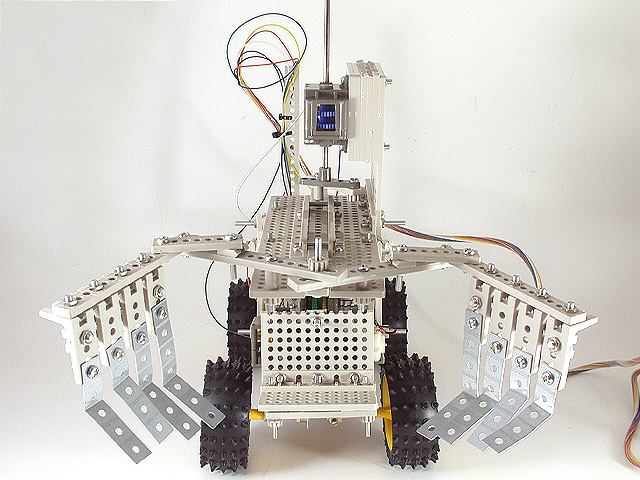
大型のつめが特徴の、火星ローバー。 このつめでモノをつかんで運びます。
|
【火星ローバーについて】
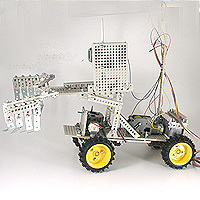
火星ローバーは、①走行部分 ②ステアリング ③アーム上下 ④アーム ⑤コントロールボックス の5つのパーツで出来ています。
①走行部分
走行部分は、タミヤのユニバーサルプレートやキットを使うので、比較的簡単に組立てられます。
タイヤの大きさは、乗り越えたい段差の3倍にすると、乗り越えることが出来ます。
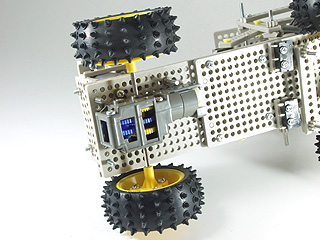
タミヤのキットを使っています。 |
|

65mmのタイヤなので、
約21mmの段差を乗り越えられます。
|
②ステアリング

左右に走行させるための、ステアリング機構です。
平行リンク機構で再現しました。
火星ローバーは胴体が長いため、小回りがききません。
操縦する際は、切替して操縦して下さい。
モーターが回転しすぎないように、電子回路も組み込んで、ステアリングを制御しています。
③アーム上下
アームを上下に動かす機構は、定番のてこクランク機構です。
アーム全体がかなりの重さなので、ギヤボックスはトルクが大きいものを使いました。
そのため、上下する速度が遅いです。
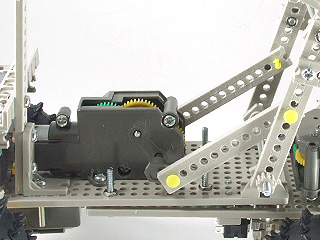
教科書でおなじみの、てこクランク機構。 |
|
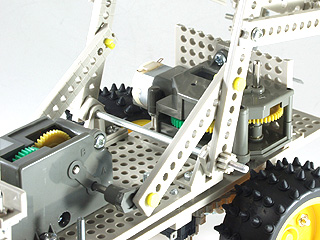
強度を持たせたいなら、
材質を金属にすると良いです
。 |
④アーム
アームで、ものをつかむことができます。
つかむ動きは結構複雑で、「固定スライダークランク機構」 と 「往復両スライダークランク機構」 の2つで構成されています。
アームだけ抜き出すと、さそりのような形をしています。
つめは、万力などを使い、折り曲げます。
好きな形にして、うまくモノをつかむように工夫して下さい。
さそりのようなアーム。 |
|
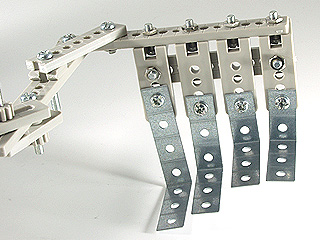
大きなつめで、ガッツと抱え込みます |
⑤コントロールボックス
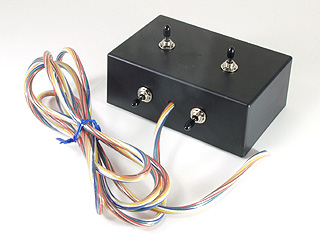
火星ローバーを操作するコントロールボックスは、定番のHブリッジ回路です。
4つのモーターを制御するので、4つのHブリッジ回路(4チャンネル)で、構成されています。
市販の4チャンネルリモコンボックスをお持ちの方は、そちらを利用してもかまいません。
コードの長さは2mです。
【YouTubeの動画】
リモコンのスイッチを入れると、前後、左右、上下、つかむ 運動をします。
左右のステアリングは分かり難いですが、ちゃんと回転しています。
YouTubeの動画(25秒)
|