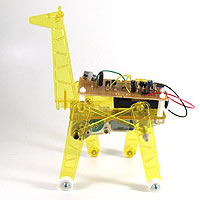
① パチン!と、拍手すると歩き出し、しばらくすると自動で止まる、 「音に反応するキリンロボット」です。 。 DEN-D-012お買い求めはこちらです。
執筆しました ! アマゾンからのご購入はこちらです。
執筆しました ! アマゾンからのご購入はこちらです。
・
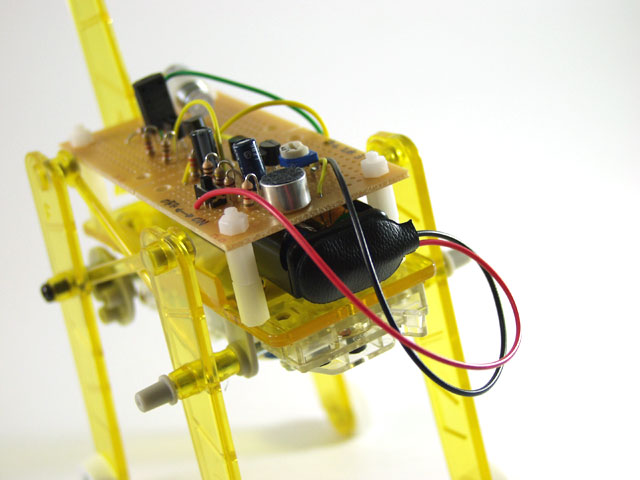
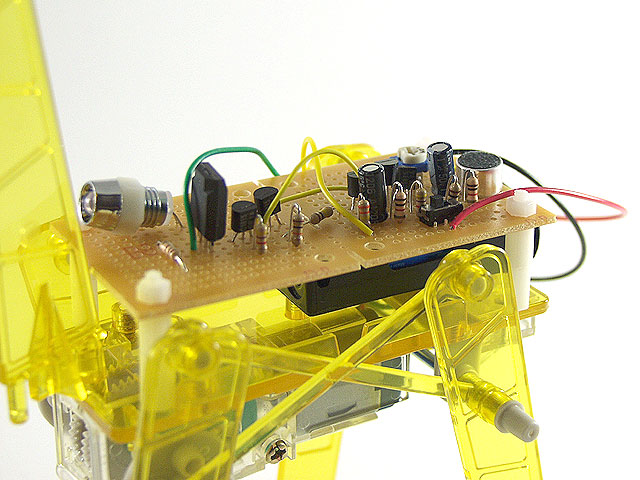
回路はユニバーサル基板で、配線図付きです。
・
電源は、制御回路とモータとも共通で、3V(単4乾電池2本)です。
・
音の感度調整は出来ますが、歩く時間は固定のため、調整できません。
・
配線が短いので、やり難い場合は、ジャンパー線などを使い、コードを延長して下さい。
・
入っている商品は、タミヤの「メカ・キリン」と改造パーツ、改造するさいの説明書一式です。
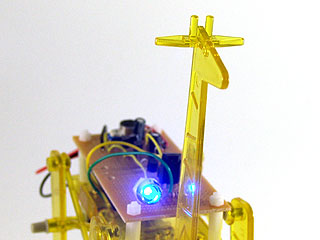
背が高く、すらりとしたキリンです。
電子回路は、背中に乗っているだけで、結構安定しています。
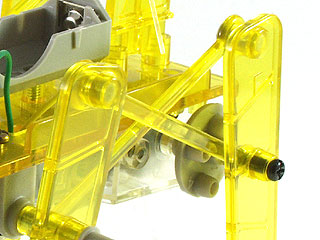
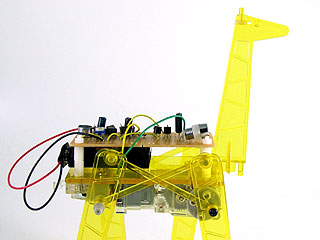
改造する、タミヤのメカ・キリン。
4節クランク機構で歩きます。
音は、エレクトレットコンデンサマイク(ECM)で、キャッチします。
音をキャッチする、
エレクトレットコンデンサマイク。
音の感度調整をする、
半固定ボリューム。
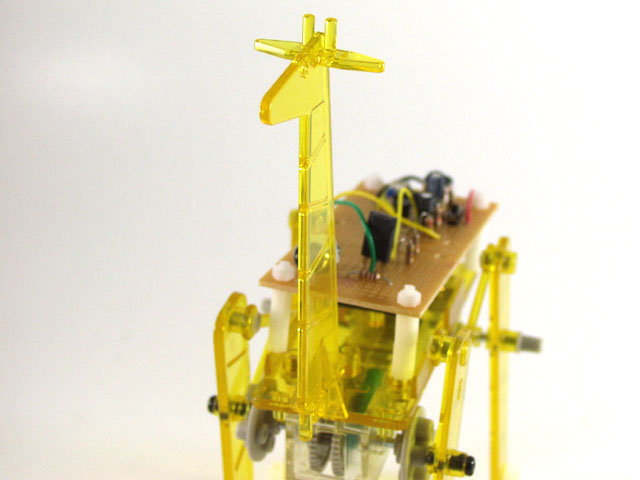
本キットは、「索敵型」のロボットをイメージしてみました。
索敵型ロボット のイメージです。
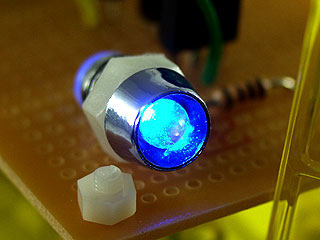
電源が入ると青く光ります。
基板は、置いているだけです。
それでも、安定感があります。
首をひねれるように取り付けなおすので、
表情をつけることができます。
電源は、制御回路用と、モータ駆動用とも共通電源です。
【YouTubeの動画】VIDEO
YouTubeの動画(34秒)
拍手すると、数秒間、前にすすみます。