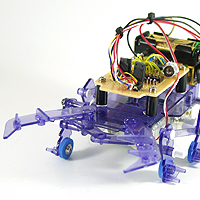
① スイッチだけでプログラミングできる、6足歩行のクワガタロボット。 DEN-D-011
執筆しました ! アマゾンからのご購入はこちらです。
・
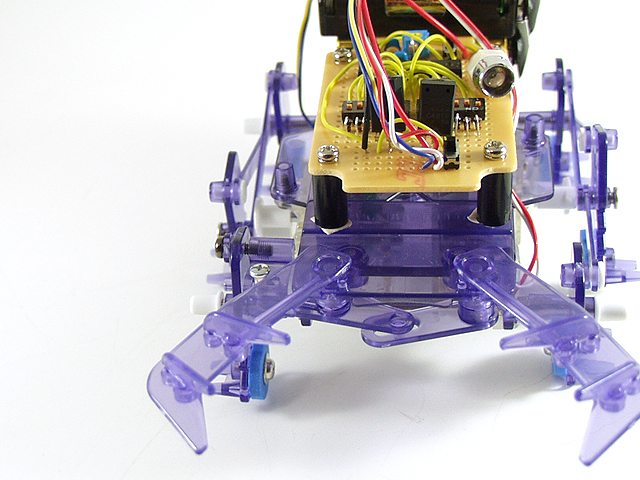
回路はユニバーサル基板で、配線図付きです。一部回路図を見る必要があります。
・
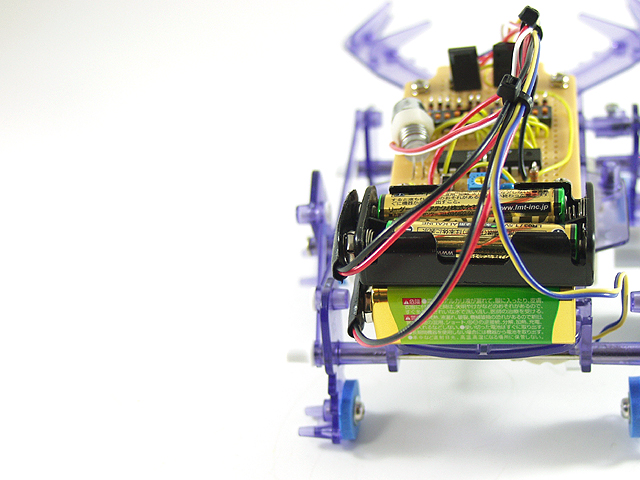
電源は、制御回路が角型9V乾電池で、モータ回路が3V(単4乾電池2本)です。
・
タミヤの「2チャンネル リモコン・クワガタムシ」を改造し、最初についていたリモコンボックスはもう、使いませんので、他の工作にご利用下さい。
・
組立に、「両面テープ」 が必要です。
・
入っている商品は、タミヤの「2チャンネル リモコン・クワガタムシ」と改造パーツ、改造するさいの説明書一式です。
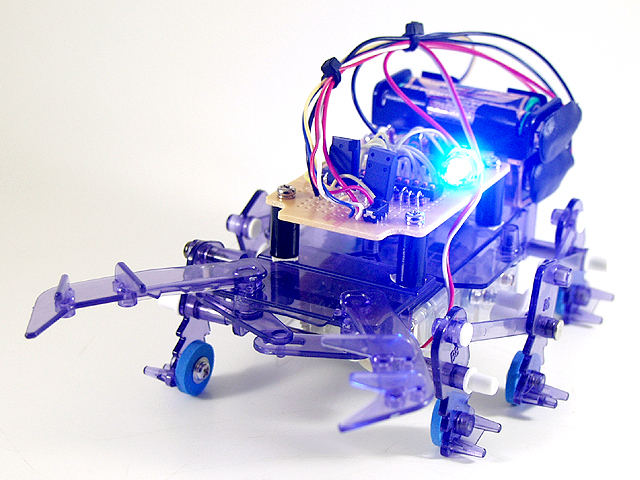
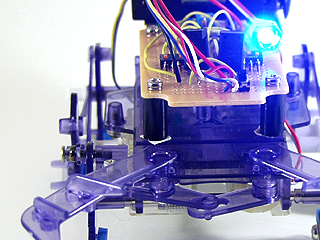
電源が入ると、パイロットランプが光ります。
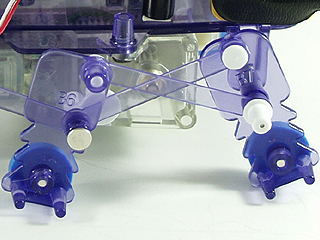
クワガタロボットの右前足が動くと、ツノが開閉します。
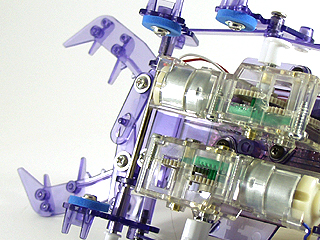
改造する、タミヤのリモコン・クワガタムシ。
4節クランク機構で歩きます。
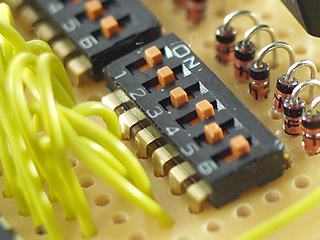
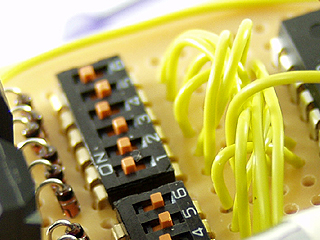
6回路のディップスイッチのONとOFFだけで、プログラミングできます。
プログラミングで使用する
ディップスイッチ。
左右2つのモータを
プログラミングします。
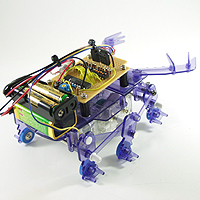
本キットは、「クワガタ型攻撃機」のロボットをイメージしてみました。
クワガタ型攻撃機 のイメージです。
電源が入ると青く光ります。
ある程度、モータが動く時間を
調節することが出来ます。
配線が多いので、頑張って
ハンダ付けして下さい。
初心者の方には無理かも。
電源は、制御回路用と、モータ駆動用の2つの電源が必要です。
【YouTubeの動画】VIDEO
YouTubeの動画(93秒)
93秒と、ちょっとながいですが、お付き合い下さいね。